��һ�� �wՓ
�S�����(hu��)�İl(f��)չ�ͿƼ����M(j��n)�����˂���(du��)���a(ch��n)�O(sh��)��������ٶȸ��졢���ȸ��ߵ�ʹ��Ҫ��늙C(j��)�������a(ch��n)�O(sh��)�������Ҫ���(q��)��(d��ng)Դ�����˂����ճ�������I(y��)���a(ch��n)���(d��ng)�о��ЏV����(y��ng)�ã��l(f��)�]��������������á����چ�Ƭ�C(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)���H�Y(ji��)��(g��u)��(ji��n)�οɿ����������ھ��̿��ƣ����зdz��õ��{(di��o)�����ܡ�
1.1 �����о���Ŀ��
����ֱ��늙C(j��)���зdz��õęC(j��)е���ܣ���N���ӵĿ��Ʒ�ʽ���Լ��dz��õĭh(hu��n)���m��(y��ng)�ԣ���ˣ�ֱ��늙C(j��)�ںܶ�I(y��)�F(xi��n)��(ch��ng)�õ�Խ��(l��i)Խ�V���đ�(y��ng)��[1-2]��ֱ��늙C(j��)����ϵ�y(t��ng)�ĺÉ�ֱ��Ӱ�늙C(j��)���ܵİl(f��)�]���������o(j��)�߰�ʮ�����������Ӽ��g(sh��)����ܶ��ֱ��늙C(j��)߀����ه��(f��)�s��ģ�M�·�M(j��n)�п��ƣ��@�Nģ�M�·���÷��xԭ��������H�Y(ji��)��(g��u)��(f��)�s�����܆�һ������һ��(g��)�����·�����m��(y��ng)ijһ��̖(h��o)��ֱ��늙C(j��)���@Ҳ��(d��o)�����@�N����ϵ�y(t��ng)��ͨ���Ա��^�������?y��n)�ֱ��늙C(j��)����ϵ�y(t��ng)�����@Щȱ�c(di��n)�����ԣ�ֱ��늄�(d��ng)�C(j��)�đ�(y��ng)�þ��кܴ�ľ�����[3-5]���S����Ӽ��g(sh��)�İl(f��)չ���mȻ���(l��i)��ģ�M�c(di��n)�·���б��^�õ����ܣ��܉�M��ijЩ����Ļ���������ģ�MԪ���ڴ���늙C(j��)�\(y��n)�Џ�(qi��ng)�ɔ_�ĭh(hu��n)���£��������ܵ��ɔ_����������½��������l(f��)���¹ʡ�[6-8]���S���ƌW(xu��)���g(sh��)�İl(f��)չ����������Ӽ��g(sh��)�͂��������g(sh��)���M(j��n)�����ܶ�ܶ����Է��b�ڼ����·�Ќ�(sh��)�F(xi��n)�������S����Ӌ(j��)��C(j��)���ռ����ܶ���(f��)�s�㷨�Ϳ��ƹ��ܶ�����ͨ�^(gu��)��Ӌ(j��)��C(j��)��(sh��)�F(xi��n)������늙C(j��)����ϵ�y(t��ng)�ĵ����w�ٰl(f��)չ�����H���зdz��õĿ������ܣ����ҿ��ɔ_��������(qi��ng)������Ƅ�(d��ng)��ֱ��늙C(j��)���ռ��͑�(y��ng)��[9]��
�S���ƌW(xu��)���g(sh��)���M(j��n)������(d��ng)ǰ��ֱ��늙C(j��)����ϵ�y(t��ng)�ѽ�(j��ng)��u��(sh��)�F(xi��n)��ģ늿�������(sh��)�ֿ��Ʒ���l(f��)չ���e�dž�Ƭ�C(j��)���ռ��������M(j��n)��ֱ��늙C(j��)����ϵ�y(t��ng)�İl(f��)չ[10]��δ��(l��i)��ֱ��늙C(j��)����ϵ�y(t��ng)���������ܻ�����l(f��)չ�������������@�ӵİl(f��)չڅ��(sh��)�£��x���˻��چ�Ƭ�C(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�@��һ��(g��)�о��n�}�����б��^����о����x��
1.2 ��(gu��)��(n��i)����F(xi��n)��
�S�����Ԫ�����O(sh��)Ӌ(j��)�ӹ����g(sh��)�����(ji��)�ܭh(hu��n)�����R(sh��)�ļӏ�(qi��ng)��늙C(j��)�Ŀ��Ƽ��g(sh��)Ҳ�S֮�l(f��)���˾�׃���������Ӽ��g(sh��)�Լ��C(j��)���g(sh��)���w�ٰl(f��)չ����(du��)늙C(j��)���Ʒ����a(ch��n)���˾�Ӱ�[11-13]��ֱ��늄�(d��ng)�C(j��)���(q��)��(d��ng)���ƽ�(j��ng)�v�ˎׂ�(g��)�l(f��)չ�A�Ρ�������_(k��i)�P(gu��n)����ʹ늙C(j��)������ͨ��ģʽ���@��(g��)�_(k��i)�P(gu��n)���(l��i)��u���p��ɿع���Q�������������늙C(j��)���Ƴɞ�l(f��)չ����[14]����ʮ��������F(xi��n)��ȫ���������������磺���l�ܡ�GTR��IGBT�ȸ������_(k��i)�P(gu��n)�������@�N�������P(gu��n)��������������l(f��)չ���������ѽ�(j��ng)ȫ��ȡ������ͨ���l�ܣ�������ͨ���l��ʹ�ñ����ГQ���·�����ף���ȫ��������������Ҫ�����ʹ�·�õ����ĺ�(ji��n)��������֮�⣬�@Щ����߀���кܸߵ��_(k��i)�P(gu��n)�l�ʣ��Ķ������늙C(j��)�����l�ʣ�����������ͬ�r(sh��)����(g��)ϵ�y(t��ng)�ĵ��w�eҲ�õ��˺ܺõĿ���[15-17]���ς�(g��)���o(j��)��ʮ����������}�_�����{(di��o)�Ƽ��g(sh��)��늄�(d��ng)�C(j��)�Ŀ���ϵ�y(t��ng)���аl(f��)����(l��i)�������������(q��)��(d��ng)�����^С��������Ŀ���ϵ�y(t��ng)�С����ڣ������·���g(sh��)�IJ��l(f��)չ�;��w���������ܲ�����ߣ��Ј�(ch��ng)�ϳ��F(xi��n)�����}���M(j��n)���{(di��o)�ٵ�����ֱ��늄�(d��ng)�C(j��)���@���ӿ����}�_�����{(di��o)�Ƽ��g(sh��)�İl(f��)չ��ͬ�r(sh��)Ҳ��(du��)늄�(d��ng)�C(j��)�(q��)��(d��ng)���g(sh��)�a(ch��n)�������������ڵ��}�_�����{(di��o)�Ƽ��g(sh��)�DZ�����܊���I(l��ng)�����ă�(y��u)�����ܣ��܉�M����Щ��(du��)�ٶȺ;��ȶ��и�Ҫ��ĸ�ۙϵ�y(t��ng)���Щ�꣬ԓ���g(sh��)���౻��(y��ng)���ڸ��N���I(y��)��[18]��
ʮ�����o(j��)��ʮ���������������l(f��)�F(xi��n)늴ŸБ�(y��ng)�F(xi��n)��늙C(j��)���ṩ�ˈ�(ji��n)��(sh��)����Փ���A(ch��)���ں��(l��i)��ʮ��r(sh��)�g������ϵ�һ�_(t��i)ֱ��늙C(j��)�ͱ����Ƴ���(l��i)�����S��Ď�ʮ���ֱ��늙C(j��)�������ƣ����g(sh��)������졣�S��ֱ��늙C(j��)�İl(f��)չ��ֱ��늙C(j��)������Ҳ�����M(j��n)��[19]��1918�꣬����(gu��)��Lamgnal���_(k��i)�l(f��)�������ˮ�y�����������ɹ��_(k��i)�l(f��)����늙C(j��)�{(di��o)���õ���׃�b�ã���ʮ���o(j��)��ʮ������в����о��ˆT��������x���O(sh��)�䌦(du��)�����@�M�M(j��n)�п��ƣ�������K��(sh��)�(y��n)�������@�N�b�õĿɿ��Բ��ߡ����Ƶ�Ч�ʷdz��͡��O(sh��)��dz����أ�����ܿ챻�ŗ���[20]���S���ƌW(xu��)���g(sh��)����l(f��)չ���댧(d��o)�w���g(sh��)ȡ��ǰ��δ�е��M(j��n)�����_(k��i)�P(gu��n)�;��w�ܵ����Ƴɹ����鄓(chu��ng)������늙C(j��)�����o(w��)ˢֱ��늙C(j��)����(l��i)�����C(j��)��D.Hanrisanz��1950���һ����Ո(q��ng)���þ��w�ܓQ������ˢ�M(j��n)�ГQ��Č�������o(w��)ˢֱ��늙C(j��)�İl(f��)չ�춨�����õĻ��A(ch��)[21]���S���댧(d��o)�w���g(sh��)���������M(j��n)������(gu��)����1962�����û���Ч��(y��ng)�ɹ��аl(f��)���˟o(w��)ˢֱ��늙C(j��)[22]���S�����Ԫ����늙C(j��)�����е�����ȡ���ش�ͻ�ƣ��_(k��i)ʼѸ���ռ������������`���ȱȶ��O�ܸ߳��ܶ�����늙C(j��)�Ŀ�������Ҳ�dz��á�1965���(gu��)��Mieslonler��һ��������������(du��)늙C(j��)�M(j��n)�ГQ���Ŀ��Ʒ��������@��(g��)��Փ����ã���(gu��)�˵�һ�����Ƴ������íh(hu��n)�η������Լ��^(gu��)���b�e���o(w��)ˢֱ��늙C(j��)�M(j��n)�ГQ������Ŀ����������ς�(g��)���o(j��)��ʮ��������l�ܼ��g(sh��)ȡ���w�ٰl(f��)չ���ѽ�(j��ng)�_(k��i)ʼ��uȡ���˂��y(t��ng)��ֱ��늙C(j��)�����b�ã�ֱ���ÿ��Ʒ�ʽ�õ����M(j��n)��[23]��
�҇�(gu��)��ֱ��늙C(j��)������������о����ȚW���Ȱl(f��)�_(d��)��(gu��)���������ς�(g��)���o(j��)��ʮ������_(k��i)ʼ�M(j��n)�й辧�l�����ƣ����S��Ď�ʮ����Ծ��l�ܞ���A(ch��)��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)Ҳ�õ���Ҏ(gu��)ģ�đ�(y��ng)��[24]���S�����(hu��)�IJ����M(j��n)��������IJ�����ߣ��Ñ�(du��)늙C(j��)���ܺͿ���Ҫ��ҲԽ��(l��i)Խ�ߣ�����Ҫ���нY(ji��)��(g��u)��(ji��n)�Ρ��ɿ��Ժá���ȫ�Ըߵ����ԣ�߀Ҫ���]늄�(d��ng)�C(j��)�ķ�(w��n)���Ժͭh(hu��n)���ԣ��@Щ��������؇�(y��n)��h(hu��n)��(gu��)�Ҙ�(bi��o)��(zh��n)����(d��ng)ǰ��������������������һ����(hu��)���F(xi��n)�����еij��������������߀��(hu��)���������(j��)���M(j��n)��
1.3 Փ���O(sh��)Ӌ(j��)��(n��i)��
�����O(sh��)Ӌ(j��)��һ��ֱ��늙C(j��)����ϵ�y(t��ng)��ԓϵ�y(t��ng)���Ԍ�(du��)ֱ��늙C(j��)�M(j��n)���]�h(hu��n)�{(di��o)�٣�ʹϵ�y(t��ng)���_��ݔ���ٶ�ֵ��ֱ��늙C(j��)����ϵ�y(t��ng)����ͨ�^(gu��)�ٶȂ�������(du��)��(d��ng)ǰ늙C(j��)�D(zhu��n)���M(j��n)�Ќ�(sh��)�r(sh��)�ɘӣ�ϵ�y(t��ng)���@��(g��)�ɘ�ֵ���O(sh��)��ֵ�M(j��n)�Ќ�(du��)�ȣ��z���ٶ��Ƿ�ƫ�x��������ٶȲϵ�y(t��ng)�͕�(hu��)ͨ�^(gu��)�㷨ݔ��������̖(h��o)ȥ�pС�@��(g��)��ֵ��ֱ������ٶ��_(d��)���O(sh��)��ֵ���@�N���چ�Ƭ�C(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)���H�Y(ji��)��(g��u)��(ji��n)�οɿ����������ھ��̿��ƣ����зdz��õ��{(di��o)�����ܡ���ϵ�y(t��ng)����STC89C52��Ƭ�C(j��)����������������L298�(q��)��(d��ng)оƬ�(q��)��(d��ng)ֱ��늙C(j��)��늙C(j��)���ٶ����ù�늌�(du��)���M(j��n)�Йz�y(c��)��������(l��i)���ٶ��چ�Ƭ�C(j��)�����PID�㷨Ӌ(j��)�㣬ݔ����׃ռ�ձȵ��}�_����PWM����(du��)�(q��)��(d��ng)�·�M(j��n)�п��ƣ��Ķ�ʹ늙C(j��)���ٶȷ�(w��n)�����O(sh��)��ֵ��С��늙C(j��)���D(zhu��n)�ٿ���ͨ�^(gu��)���I�M(j��n)���O(sh��)�ã�Һ���@ʾ�����Ԍ�(sh��)�r(sh��)�@ʾ늙C(j��)��(d��ng)ǰ���D(zhu��n)�ٺ��O(sh��)�õ��D(zhu��n)�١�
�ڶ��� ϵ�y(t��ng)���w�����O(sh��)Ӌ(j��)
2.1 ϵ�y(t��ng)���w�����O(sh��)Ӌ(j��)
�����O(sh��)Ӌ(j��)��ֱ��늙C(j��)����ϵ�y(t��ng)�������֣��Դ�·���y(c��)���·����Ƭ�C(j��)��Сϵ�y(t��ng)�·��늙C(j��)�(q��)��(d��ng)�·�����I�·���@ʾ�·��ֱ��늙C(j��)����ϵ�y(t��ng)����ͨ�^(gu��)�ٶȂ�������(du��)��(d��ng)ǰ늙C(j��)�D(zhu��n)���M(j��n)�Ќ�(sh��)�r(sh��)�ɘӣ�ϵ�y(t��ng)���@��(g��)�ɘ�ֵ���O(sh��)��ֵ�M(j��n)�Ќ�(du��)�ȣ��z���ٶ��Ƿ�ƫ�x��������ٶȲϵ�y(t��ng)�͕�(hu��)ͨ�^(gu��)�㷨ݔ��������̖(h��o)ȥ�pС�@��(g��)��ֵ��ֱ������ٶ��_(d��)���O(sh��)��ֵ��ϵ�y(t��ng)����ԭ��D���D2.1��ʾ��
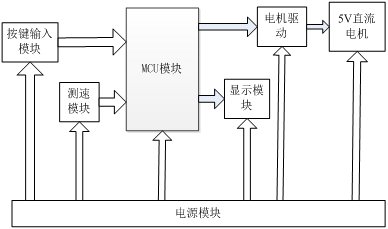
�D2.1ϵ�y(t��ng)����ԭ��D
2.2 ��ģ�K�x��
- ��Ƭ�C(j��)ģ�K��STC89C52��Ƭ�C(j��)��STC��˾���a(ch��n)��һ��������Ƭ�C(j��)������8λ�Ć�Ƭ�C(j��)������8K�ֹ�(ji��)���ɾ��̴惦(ch��)���g��ԓ��̖(h��o)����Ƭ�C(j��)��������(f��)�����Δ�(sh��)���_(d��)1000������ԓ�͆�Ƭ�C(j��)ݔ��ݔ���ڷdz������Д��Ҳ���^�S������Ƭ�C(j��)�����ɂ�(g��)���r(sh��)����ÿһ��(g��)���r(sh��)������16�ġ�
��2���y(c��)��ģ�K��ֱ��늙C(j��)����ϵ�y(t��ng)����ͨ�^(gu��)�ٶȂ�������(du��)��(d��ng)ǰ늙C(j��)�D(zhu��n)���M(j��n)�Ќ�(sh��)�r(sh��)�ɘӣ��y(c��)��ģ�Kͨ�^(gu��)�a�P(p��n)��늹ܽM��ʹ�Ì�(sh��)�F(xi��n)��ͨ�^(gu��)LM393 оƬ̎����ݔ���Ƭ�C(j��)��
��3��늙C(j��)�(q��)��(d��ng)ģ�K��L298��SGS��˾���a(ch��n)��늙C(j��)�(q��)��(d��ng)оƬ�������H�����(q��)��(d��ng)���M(j��n)늙C(j��)��Ҳ���Ԍ�(du��)ֱ��늙C(j��)�M(j��n)�п��ơ�L298N�Ŀ�����̖(h��o)ʹ��(bi��o)��(zh��n)TTL�ƽ��ԓ��оƬ���Խ��ܵ�늉������V�������(q��)��(d��ng)��������3A��늙C(j��)ؓ(f��)�d��
��4���Դģ�K��ͨ�^(gu��)�Դ�m������ϵ�y(t��ng)��Ͳ��ܣ�����������늉���5V��
��5���@ʾģ�K��Һ���@ʾ�������@ʾ��ĸ����(sh��)���Լ���̖(h��o)���ڱ��ĵ�ֱ��늙C(j��)����ϵ�y(t��ng)�У�����ͨ�^(gu��)Һ���@ʾ����(l��i)�@ʾֱ��늙C(j��)�����^(gu��)���е��ٶ�ֵ���O(sh��)��ֵ��
��6�����Iģ�K�������x�ê�(d��)�����I��(sh��)�F(xi��n)�˙C(j��)�������ܣ�ʹ���߿���ͨ�^(gu��)���I��(du��)늙C(j��)�D(zhu��n)�ٺ��D(zhu��n)��(d��ng)�����M(j��n)���O(sh��)�á�
������ ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)
3.1 ��Ƭ�C(j��)��Сϵ�y(t��ng)�O(sh��)Ӌ(j��)
STC89C52��Ƭ�C(j��)���_���D3.1��ʾ��
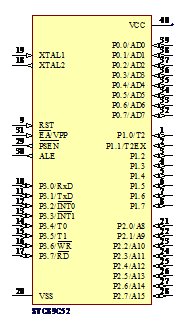
�D3.1 STC89C52оƬ���_�D
����(g��)���_�Ĺ������£�
VCC�����늉���
GND���ӵء�
P0�ڣ�����һ��(g��)�p��ݔ��ݔ���ڣ�һ���а�λ��ȫ�������_(k��i)©�O��ʽ����(d��ng)ijһλ���_���ø��ƽ�r(sh��)�����ஔ(d��ng)���@��(g��)λ���O(sh��)�Þ���衣ԓ�˿ڳ��˿��Ԯ�(d��ng)����ͨݔ��ݔ������֮�⣬߀�����Á�(l��i)�U(ku��)չ�ⲿ�惦(ch��)������(d��ng)�@��(g��)�˿��Á�(l��i)�U(ku��)չ16λ���ⲿ�惦(ch��)���r(sh��)�����ǵͰ�λ��ݔ����ַ��ͨ�^(gu��)���U(ku��)չ�惦(ch��)��������߆�Ƭ�C(j��)�Ĵ惦(ch��)���ܡ�
P1�ڣ�����һ��(g��)�p��ݔ��ݔ���ڣ�һ���а�λ���@��(g��)����Ҫ��(n��i)���ṩ���������܌�(sh��)�F(xi��n)һЩ���ܡ�
P2�ڣ�����һ��(g��)�p��ݔ��ݔ���ڣ�һ���а�λ���@��(g��)����Ҫ��(n��i)���ṩ�������š���(d��ng)ԓ�˿�ijһ���_���ø��ƽ��(n��i)����������茢�Ğ鏊(qi��ng)�����ߺ���ݔ�룬��(d��ng)ԓ�˿�ijһ���_���õ��ƽ����?y��n)��Ƭ�C(j��)��(n��i)���������Ĵ��ڣ���(hu��)�����ݔ������(d��ng)�@��(g��)�˿��Á�(l��i)�U(ku��)չ16λ���ⲿ�惦(ch��)���r(sh��)�����Ǹ߰�λ��ݔ����ַ��
P3�ڣ�����һ��(g��)�p��ݔ��ݔ���ڣ�һ���а�λ���@��(g��)����Ҫ��(n��i)���ṩ���������܌�(sh��)�F(xi��n)һЩ���ܡ���(d��ng)ԓ�˿�ijһ���_���ø��ƽ��(n��i)����������茢�Ğ鏊(qi��ng)�����ߺ���ݔ�롣��(d��ng)ԓ�˿�ijһ���_���õ��ƽ����?y��n)��Ƭ�C(j��)��(n��i)���������Ĵ��ڣ���(hu��)�����ݔ����
һЩ�����Ҳ��ͨ�^(gu��)P3�ڌ�(sh��)�F(xi��n)�ģ����w���£�
���_ ���x���ܣ�
P3.0 RXD������ݔ��ڣ�
P3.1 TXD������ݔ���ڣ�
P3.2 /INT0���ⲿ�Д�0��
P3.3 /INT1���ⲿ�Д�1��
P3.4 T0��Ӌ(j��)�r(sh��)��0�ⲿݔ�룩
P3.5 T1��Ӌ(j��)�r(sh��)��1�ⲿݔ�룩
P3.6 /WR���ⲿ��(sh��)��(j��)�惦(ch��)����(xi��)�xͨ��
P3.7 /RD���ⲿ��(sh��)��(j��)�惦(ch��)���x�xͨ��
P3��ͬ�r(sh��)���W�q���̺;���У�(y��n)����һЩ������̖(h��o)��
RST����(f��)λݔ�롣��(d��ng)RST�_���m(x��)�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�g�r(sh��)����Ƭ�C(j��)��(f��)λ��
PSEN����ӵij���惦(ch��)����Ƭ�x��̖(h��o)��
XTAL1����(n��i)���r(sh��)犹����·ݔ��˿ڡ�
XTAL2����(l��i)�Է�����ʎ����ݔ���˿ڡ�
����ʹ��Ƭ�C(j��)������ϵ�y(t��ng)���ٕ�(hu��)����һ��(g��)�r(sh��)��·��һ��(g��)��(f��)λ�·������ֱ��Q���Ƭ�C(j��)��Сϵ�y(t��ng)�����ˌ�(sh��)�F(xi��n)��(f��)λ���ܣ�����Ҫ��(f��)λ�_�S�������ஔ(d��ng)�ڃɂ�(g��)�C(j��)�����ڕr(sh��)�g�ĸ��ƽ���@�Ӳ������ϵ�y(t��ng)��(f��)λ����(f��)λ��̖(h��o)�Ć�Ƭ�C(j��)�ĵھ��_ݔ�룬�ք�(d��ng)����(f��)λ���I����(f��)λ�_ݔ��һ��(g��)���ƽ����(d��ng)���_(k��i)��(f��)λ�I���Դ�o��ݳ�늣��˕r(sh��)�ď�(f��)λ�_ݔ���ƽ����׃С��ֱ����ݳ�M늣���ݔ��һ��(g��)���ƽ���ڰ��I���µ�ݔ�����ƽ�@�Εr(sh��)�g�h(yu��n)�h(yu��n)���ڃɂ�(g��)�C(j��)е���ڣ����Կ����ք�(d��ng)��(du��)��Ƭ�C(j��)�M(j��n)�Џ�(f��)λ����Ƭ�C(j��)��Сϵ�y(t��ng)�ĕr(sh��)��·�t���(n��i)�������ṩ�r(sh��)���̖(h��o)�����]�����̵ķ����ԣ��@���x��ľ����12MHz����ͨ�^(gu��)�ɂ�(g��)��ݲ�(li��n)ݔ�뵽��Ƭ�C(j��)���ⲿ�r(sh��)����_����Ƭ�C(j��)����Сϵ�y(t��ng)ԭ��D���D3.2��ʾ����Сϵ�y(t��ng)������·�D���D3.3��ʾ��
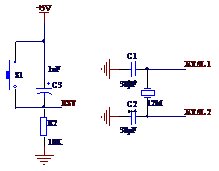
�D3.2 �r(sh��)��·�͏�(f��)λ�·
��Ƭ�C(j��)����Сϵ�y(t��ng)�D��D3.3��ʾ��
�D3.3STC89C52оƬ��Сϵ�y(t��ng)�D
3.2�y(c��)��ģ�K�·
3.2.1 �ٶȜy(c��)������
ֱ��늙C(j��)����ϵ�y(t��ng)����ͨ�^(gu��)�ٶȂ�������(du��)��(d��ng)ǰ늙C(j��)�D(zhu��n)���M(j��n)�Ќ�(sh��)�r(sh��)�ɘӣ��y(c��)��ģ�Kͨ�^(gu��)�a�P(p��n)��늹ܽM��ʹ�Ì�(sh��)�F(xi��n)��ͨ�^(gu��)LM393 оƬ̎����ݔ���Ƭ�C(j��)����Ҋ(ji��n)���ٶȜy(c��)���������������N��
1��M���y(c��)��
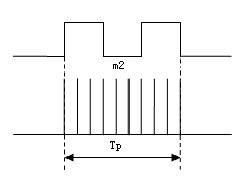
��һ���y(c��)���r(sh��)�gT��(n��i)���y(c��)���}�_�l(f��)���������ݔ���}�_���a(ch��n)�����}�_��(sh��)m1��(l��i)�y(c��)���D(zhu��n)�٣���M�����y(c��)���D(zhu��n)���}�_��D3.4��ʾ���O(sh��)��һ���r(sh��)�gT��(n��i)��늙C(j��)�D(zhu��n)�S�D(zhu��n)�^(gu��)�Ļ��Ȟ�X�ӣ��t�D(zhu��n)��n��������ʽ3.1-3��ʾ��
n= (3.1)
(3.1)
�D(zhu��n)�S�D(zhu��n)�^(gu��)�Ļ��Ȕ�(sh��)X�ӿ�����ʽ��ʾm1
 (3.2)
(3.2)
�D3.4��M�����y(c��)���D(zhu��n)���}�_
����3.1��ʽ���루3.2��ʽ��
�D(zhu��n)��n�ı��_(d��)ʽ�飺
n= ��3.3��
��3.3��
2��T���y(c��)��
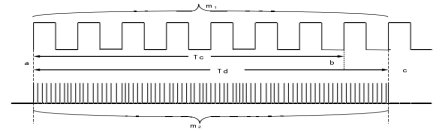
����T���y(c��)�٣��D(zhu��n)���Ǹ���(j��)�ɂ�(g��)�}�_�ĕr(sh��)�g�g���(l��i)Ӌ(j��)�㡣�a�P(p��n)�Іξ��Ͷྀ�����x��(d��ng)�x�Æξ��a�P(p��n)�r(sh��)��ֻҪ֪���ɴ��}�_�ĕr(sh��)�g�g�����܉�����D(zhu��n)�١���(d��ng)�x�Æξ��a�P(p��n)�r(sh��)���y(c��)���ĕr(sh��)�gֻ��ÿ�D(zhu��n)��1/N��N��a�P(p��n)�ľ���(sh��)������T�����}���y(c��)��ԭ�����D3.5ʾ�����r(sh��)����(du��)�r(sh��)���}�_�M(j��n)��Ӌ(j��)��(sh��)���r(sh��)�������һ��(g��)TP��(n��i)Ӌ(j��)��(sh��)ֵ��m2���tӋ(j��)�㹫ʽ�飺
n=

��3.4��
����

��3.5��
�D3.5��T�����}���y(c��)��
3�� M/T�����y(c��)��
���^M/T���y(c��)�٣����ǽY(ji��)���ˡ�M�����͡�T�����քe��(du��)�D(zhu��n)�ٵͺߕr(sh��)���еIJ�һ�ӵľ��ȣ��Y(ji��)���������ߵă�(y��u)�c(di��n)�ķ������䷽���ľ����ǽ��ڡ�M�����͡�T����֮�g����M/T�������r(sh��)/Ӌ(j��)��(sh��)�y(c��)����D3.6��ʾ��
�D3.6 ��M/T�������r(sh��)/Ӌ(j��)��(sh��)�y(c��)��
����(j��)�����������ɹ�ʽ3-4��ʽ3-5���Ԍ�(du��)����M/T���y(c��)���D(zhu��n)�ٵĹ�ʽ���£�

(3.6)
3.2.2 �y(c��)��ģ�K�·�O(sh��)Ӌ(j��)
�y(c��)��ģ�K�·��D3.7��ʾ�����R4�����������������C��늹ܵķ�(w��n)���\(y��n)�У����R3�������nj�(du��)��늹�ݔ���M(j��n)��������ͨ�^(gu��)�@��(g��)��������������׃���D(zhu��n)�Q��늉���׃��������ݔ����늉�߀�Dz���(bi��o)��(zh��n)����ˣ��҂�?c��)ں��߀�O(sh��)Ӌ(j��)��һ��(g��)���^������̖(h��o)׃����(j��ng)�^(gu��)���^���Ϳ���ݔ��һ��(g��)��(bi��o)��(zh��n)���}�_��̖(h��o)��
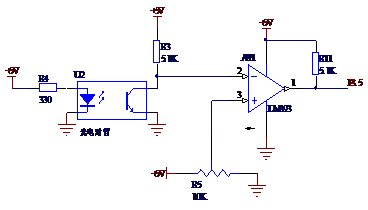
�D3.7 �y(c��)��ģ�K�·�D
3.3 늙C(j��)�(q��)��(d��ng)�·
3.3.1 L298N��(ji��n)��
L298��SGS��˾���a(ch��n)��늙C(j��)�(q��)��(d��ng)оƬ�������H�����(q��)��(d��ng)���M(j��n)늙C(j��)��Ҳ���Ԍ�(du��)ֱ��늙C(j��)�M(j��n)�п��ơ�L298N�Ŀ�����̖(h��o)ʹ��(bi��o)��(zh��n)TTL�ƽ��ԓ��оƬ���Խ��ܵ�늉������V�������(q��)��(d��ng)��������3A��늙C(j��)ؓ(f��)�d����(d��ng)�҂���L298ͬ�r(sh��)�(q��)��(d��ng)2·늄�(d��ng)�C(j��)�r(sh��)����Ҫ�ăɌ�(du��)ݔ���ڽӾ���L298N�Ŀ���߉���±�3.1��ʾ��
��3.1 L298N����߉�D
3.3.2 L298Nֱ��늙C(j��)�(q��)��(d��ng)�·�O(sh��)Ӌ(j��)
�����O(sh��)Ӌ(j��)��늙C(j��)�(q��)��(d��ng)�·���D3.8��ʾ���҂��x�Æ�Ƭ�C(j��)3.1�˿ں�3.2�˿ڃɂ�(g��)�˿ڌ�(du��)늙C(j��)�ķ����M(j��n)�п��ƣ���3.0�˿ڮa(ch��n)���}�_����ͨ�^(gu��)�����}�_����PWM�����Ը�׃늙C(j��)�D(zhu��n)�١�������ֵ������������C�·�ɿ��\(y��n)�У��҂�?c��)�ݔ���˽��б��o(h��)���O�ܡ�
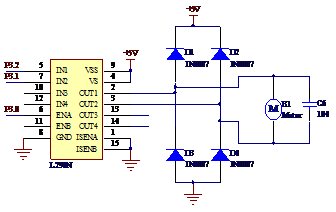
�D3.8 늙C(j��)�(q��)��(d��ng)�·
3.4 ���I�·
�����O(sh��)Ӌ(j��)�İ��I�·���D3.9��ʾ�����˺�(ji��n)�����̣���(ji��)�s��Ƭ�C(j��)���_�YԴ���@����õ��Ǫ�(d��)�����I�����ˌ�(sh��)�F(xi��n)늙C(j��)�Ŀ��ƹ��ܣ��@���O(sh��)Ӌ(j��)5��(g��)���I�����I�����ҷքe��ģʽ���I��늙C(j��)�ٶȼӣ��p���_�����I��늙C(j��)�������D(zhu��n)���ơ�

�D3.9 ���I�·
3.5 LCD1602�@ʾ�·
3.5.1 LCD1602���_���ܽ�B
Һ���@ʾ�����_�f(shu��)�����£�
1�_��VSS���Դؓ(f��)��
2�_��VDD���Դ����
3�_��VL�_ͨ�^(gu��)���һ��(g��)����(d��ng)׃���������Ԍ�(du��)Һ���@ʾ���Č�(du��)�ȶ��M(j��n)���{(di��o)��(ji��)������(d��ng)׃�����։���С�r(sh��)��Һ���@ʾ���Č�(du��)�ȶ���ͣ�����(d��ng)׃�����։����r(sh��)��Һ���@ʾ���Č�(du��)�ȶ���ߣ�����(d��ng)׃��������ֵһ��ȡ��10K��
4�_��RS��ָ��͔�(sh��)��(j��)���x��˿ڣ�����o�@��(g��)���_��λ���ƽ���t��ʾ�xȡ��(sh��)��(j��)�Ĵ������ܣ�����o�@��(g��)���_�O(sh��)�õ��ƽ���t��ʾ�xȡָ��Ĵ������ܡ�
5�_��R/W���x��(xi��)���ƶ˿ڣ�����@��(g��)���_�o���ƽ���t�O(sh��)�Þ��x���ƣ�����@��(g��)���_�o���ƽ���t�O(sh��)�Þ錑(xi��)���ơ�
6�_��EN��ʹ�ܿ��ƶ˿ڣ�ֻ�����@��(g��)�˿ڵ��½��أ����܌�(sh��)�F(xi��n)Һ���@ʾ���ĸ����ֹ��ܡ�
7��14�_��D0��D7��8λ�p��(sh��)��(j��)����
15�_������Դ���O��
16�_������Դؓ(f��)�O
3.5.2 LCD1602�(q��)��(d��ng)�·�O(sh��)Ӌ(j��)
Һ���@ʾ�������@ʾ��ĸ����(sh��)���Լ���̖(h��o)���ڱ��ĵ�ֱ��늙C(j��)����ϵ�y(t��ng)�У�����ͨ�^(gu��)Һ���@ʾ����(l��i)�@ʾֱ��늙C(j��)�����^(gu��)���е��ٶ�ֵ���O(sh��)��ֵ��Һ���@ʾ�·���D2.6��ʾ���ψD�е����R1�����Á�(l��i)�{(di��o)��(ji��)Һ���@ʾ������ġ�
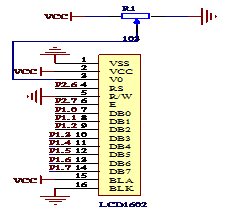
�D3.10��LCD1602�(q��)��(d��ng)�·
������ ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
4.1 PID�㷨��(ji��n)��
���ˌ�(sh��)�F(xi��n)ֱ��늙C(j��)�ٶȵĜ�(zh��n)�_�y(c��)�����@���x��PID�㷨��(du��)늙C(j��)�M(j��n)�е��ٶ��M(j��n)���]�h(hu��n)���ơ�PID�㷨���Է֞�ģ�MPID�͔�(sh��)��PID�ɷN��
4.1.1ģ�MPID
�����ڵĿ���ϵ�y(t��ng)�У�ģ�MPID����ϵ�y(t��ng)���J(r��n)������Ч����ɿ��Ŀ���ϵ�y(t��ng)֮һ��ģ�MPID����ϵ�y(t��ng)�Ĺ���ԭ�����D4.1��ʾ��
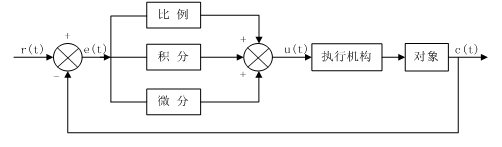
�D4.1 ģ�MPID����ϵ�y(t��ng)����ԭ��
ԓP(y��ng)ID���ƿ��������{(di��o)��(ji��)�^(gu��)�̷dz����ԣ�ͨ�^(gu��)��(du��)�Ȍ�(sh��)�H�y(c��)��ֵ ���O(sh��)��ֵ
���O(sh��)��ֵ ��ֵ��Ӌ(j��)���ϵ�y(t��ng)���`�
��ֵ��Ӌ(j��)���ϵ�y(t��ng)���`�
 =
= ��
�� ��4.1��
��4.1��
Ӌ(j��)�����ƫ���ڿ��������M(j��n)�б������e�֡����\(y��n)�㣬�ó�������̖(h��o)��������̖(h��o)ͨ�^(gu��)�D(zhu��n)��̎����K�����ڿ��ƌ�(du��)���ϣ�ʹ���،�(du��)���O(sh��)��ֵ�\(y��n)�У��ʷQ��PID�{(di��o)��(ji��)����ģ�MPID��������Ӌ(j��)�㹫ʽ4.2��
 ��4.2��
��4.2��
4.1.2��(sh��)��PID
���˱���Ӌ(j��)��C(j��)�\(y��n)�㣬ʹģ�MPID����һ��Ҏ(gu��)���xɢ�����@�(du��)��ʽ4.1�M(j��n)��׃�Ξ� ��
 =
= ��
�� ��4.3��
��4.3��
���ڲɘӌ�(sh��)�����ڱ��^�̣��@����ý��Ƶķ�����������Ǿ��У�
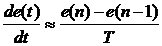 ��4.4��
��4.4��
 ��4.5��
��4.5��
ͨ�^(gu��)����̎��������Ĺ�ʽ4-2�Ϳ��Ե�Ч�飺
 ��4.6��
��4.6��
���湫ʽ�еď������������DZ����(xi��ng)���e���(xi��ng)�����(xi��ng)��
�@���N����ͨ�����džΪ�(d��)ʹ�û��ߺϲ�ʹ�ã��M��ʹ�Õr(sh��)�����N��ʽ��
P����:  ��4.7��
��4.7��
PI����:  ��4.8��
��4.8��
PD����: 
 ��4.9��
��4.9��
PID����:  ��4.10��
��4.10��
ͨ�^(gu��)����4.6�����Եó�����λ��ʽPID�����ƫ���۷e��ȱ�c(di��n)���@�(du��)���M(j��n)���˸��M(j��n)�����w���£�
 ��4.11��
��4.11��
��ʽ2.6��ʽ2.11���p���͕�(hu��)�õ�����ʽPID��Ӌ(j��)�㹫ʽ���£�

 ��4.12��
��4.12��
����ʽ�ɵÔ�(sh��)��PIDλ���Ϳ�����ʽ��:
 ��4.13��
��4.13��
ʽ�У�  �Q��������棻
�Q��������棻
 �Q��e��ϵ��(sh��)��
�Q��e��ϵ��(sh��)��
 �Q����ϵ��(sh��)��
�Q����ϵ��(sh��)��
λ��ʽPID������ʽPID�Ŀ���ԭ��D�քe��D4.2��4.3��ʾ��
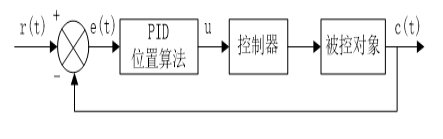
�D4.2 λ��ʽPID����ԭ��D
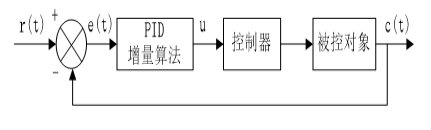
�D4.3 ����ʽPID����ԭ��D
ͨ�^(gu��)������������(du��)ģ�MʽPID�͔�(sh��)��ʽPID�M(j��n)����Ԕ��(x��)������B�����O(sh��)Ӌ(j��)��K�x��(sh��)��ʽPID��������㷨��
4.2ϵ�y(t��ng)����������
ϵ�y(t��ng)������������D4.4��ʾ��ϵ�y(t��ng)��늺������M(j��n)�г�ʼ����Ȼ��(du��)���I�M(j��n)�����O(sh��)���Д��ٶȰ��I�Л](m��i)�б����£�����ٶȰ��I�������ˣ�ϵ�y(t��ng)�͕�(hu��)�����ٶ��O(sh��)������?q��)��ٶ��M(j��n)���O(sh��)����������ٶȰ��I�](m��i)�б����£���Ƭ�C(j��)ֱ���xȡ��(d��ng)ǰ늙C(j��)���D(zhu��n)�١�ͨ�^(gu��)PID�㷨Ӌ(j��)�㣬ݔ��������̖(h��o)��ʹ�ٶȷ�(w��n)�����O(sh��)��ֵ��Һ���@ʾ���@ʾ��(d��ng)ǰ���D(zhu��n)�ٺ��O(sh��)�õ��D(zhu��n)�١�
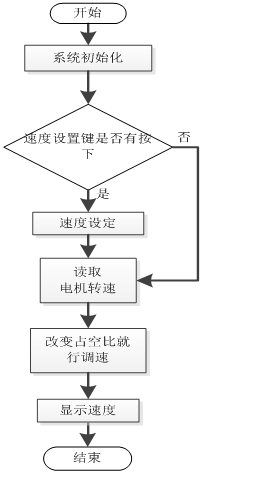
�D4.4ϵ�y(t��ng)���������̈D
4.3 ���r(sh��)��T0�����(w��)��������
���r(sh��)��T0�Д����(w��)����������D4.5��ʾ���Д�푑�(y��ng)�������P(gu��n)�]�Д��M(j��n)�Д�(sh��)��(j��)̎����ͨ�^(gu��)�xȡӋ(j��)��(sh��)����(sh��)ֵ��(l��i)Ӌ(j��)���ٶȣ�Ȼ���{(di��o)��(ji��)PWM��(l��i)�M(j��n)���{(di��o)�٣�֮��Ӌ(j��)��(sh��)�����㣬���鶨�r(sh��)���b��ֵ���ڴ��_(k��i)�Дࡣ

�D4.5 ���r(sh��)��T0�Д����(w��)�������̈D
4.4 ���I�����������
���I�����������ij̈D���D4.6��ʾ��ϵ�y(t��ng)��ɳ�ʼ������ѭ�h(hu��n)�����Ќ�(du��)���I�M(j��n)�В��裬�����Ŀ���nj�(sh��)�r(sh��)�z�y(c��)�Л](m��i)�а��I���£�����z�y(c��)���а��I���£��@��߀�����Д��Ƿ���İ��°��I��߀����M(j��n)������̎������ֹ����(d��ng)��(du��)�Д�a(ch��n)���`�У��������̎����߀��Ҫ�ٴΌ�(du��)���I�M(j��n)�Йz�y(c��)������@��߀�Ǚz�y(c��)�����I���£���ô�͕�(hu��)��(zh��)������(y��ng)�IJ�����

�D4.6 �I�P(p��n)�������̈D
4.5 LCD1602��(xi��)����
Һ���@ʾ���Č�(xi��)�������̈D��D4.7��ʾ��Һ���@ʾ���ڌ�(sh��)�F(xi��n)��(xi��)�����^(gu��)���У����ȕ�(hu��)�z����(bi��o)�Л](m��i)���_(k��i)��������������Ļ�ȳ�ʼ��������Ȼ��ϵ�y(t��ng)��(hu��)����(j��)�O(sh��)�õij����Д��@ʾλ���������(du��)Һ���@ʾ���M(j��n)�е�ַ��(xi��)���������ϵ�y(t��ng)����Ҫ�@ʾ�ă�(n��i)��ͨ�^(gu��)�͵��@ʾ�����@ʾ��ͨ����r�£��҂�ֻҪ������Ό�(du��)Һ���M(j��n)�Ќ�(xi��)�������Ϳ��Ԍ�(sh��)�F(xi��n)���N�@ʾ���ܡ�

�D4.7 LCD1602��(xi��)�������̈D
�� �x
�ڱ��ή��I(y��)�O(sh��)Ӌ(j��)�У����x���}Ŀ����ԃ���P(gu��n)���ϣ��ٵ��O(sh��)Ӌ(j��)�·�������O(sh��)Ӌ(j��)����(du��)�@Щ�Ҷ������˺ܶ���Ѫ����ÿ��(g��)�˵�֪�R(sh��)��(ch��)�䲢����ôȫ�棬�H�Hһ��(g��)�˵�Ŭ���Dz�����ˣ�ֻ���ڵõ��˺ܶ��ώ���ͬ�W(xu��)��֧���£��Ҳ�������@��(g��)�O(sh��)Ӌ(j��)�����@���Ҫ�e���x�ҵČ�(d��o)��XX�ώ����ڮ��I(y��)�O(sh��)Ӌ(j��)���_(k��i)ʼ���ώ��o���Һܶ�������ָ��(d��o)���˽��˺ܶ���Ƭ�C(j��)�����P(gu��n)֪�R(sh��)�����ڮ�(d��ng)���O(sh��)Ӌ(j��)�������y�r(sh��)�����r(sh��)�Ľo������Ą�(l��)��ͬ�r(sh��)����(du��)�������W(xu��)�ƵĹĄ�(l��)Ҳ�B�ڮ��I(y��)�O(sh��)Ӌ(j��)�r(sh��)���o����Ī������ģ����������ɮ��I(y��)�O(sh��)Ӌ(j��)���˷dz���Ҫ�����á������������Փ�ĕr(sh��)���������J(r��n)����x֮��o�����J(r��n)����u(p��ng)�r(ji��)��ʹ���ҵ�Փ�ğo(w��)Փ�Ǐă�(n��i)����߀�Ǹ�ʽ�϶����˺ܴ���M(j��n)������߀Ҫ���x��(sh��)��(x��)�M����(sh��)�(y��n)�ҵ������ώ������ҵĮ��I(y��)�O(sh��)Ӌ(j��)�ṩ�˷dz������ėl�������߀Ҫ���x�����ҵ�ͬ�W(xu��)�������������y�r(sh��)�o�������ĵĎ������](m��i)�������o(w��)˽�Ď�����Ҳ����(hu��)���ҽ���Į��I(y��)�O(sh��)Ӌ(j��)��
�����īI(xi��n)
[1]���x,ʯ��(sh��)��,�]��(l��),����߃,���²�. ����STM32��Ƭ�C(j��)�Ĕ�(sh��)��ֱ���{(di��o)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J]. ���(y��ng)�W(xu��)Ժ�W(xu��)��(b��o)(��Ȼ�ƌW(xu��)��),2017,(01):88-92.
[2]�����G. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J]. ����O(sh��)Ӌ(j��)����,2016,(22):158-160.
[3]ղ�f��. ��Ƭ�C(j��)���Ƶ�ֱ��늙C(j��)�]�h(hu��n)�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. �d�(y��ng)�����W(xu��)Ժ�W(xu��)��(b��o),2016,(11):23-27.
[4]�ߏ�(qi��ng),������,������. ����STM8S207ֱ��늙C(j��)���ƽ̌W(xu��)��(sh��)�(y��n)ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. 늚���ӽ̌W(xu��)�W(xu��)��(b��o),2016,(06):116-119.
[5]�x��,��ϼ. ����С܇����ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. �������cϵ�y(t��ng),2016,(12):1-3.
[6]����,��ꐿ�. �����p��Ƭ�C(j��)�ğo(w��)ˢֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J]. ��(li��n)�W(w��ng)���g(sh��),2015,(12):47-50.
[7]�컢,����,�Tѩ,������. ܇��늙C(j��)�]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J]. �C(j��)늼��g(sh��),2015,(06):92-94+98.
[8]����÷. ���چ�Ƭ�C(j��)���Ƶ�PWMֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)[J]. �Ƽ�����,2015,(24):155+157.
[9]������. ����AT89S52��Ƭ�C(j��)��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)[J]. ɽ�|���I(y��)���g(sh��),2016,(03):149.
[10]�����A,����. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. �F(xi��n)�����켼�g(sh��)�c�b��,2016,(01):72-74.
[11]�S��÷,������,��(li��n)��. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�c��(sh��)�`[J]. 늚��Ԅ�(d��ng)��,2016,(01):1-2+5.
[12]���M(j��n)��. ����STC89C52��Ƭ�C(j��)��ƹ���������߶��Ԅ�(d��ng)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. �Ԅ�(d��ng)����(y��ng)��,2016,(02):34-36+40.
[13]�۽�. ����STM32��ֱ��늙C(j��)PID�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J]. �F(xi��n)����Ӽ��g(sh��),2016,(08):165-167+170.
[14]��ͮ. ����STM8S��Ƭ�C(j��)�ğo(w��)ˢֱ��늙C(j��)���������O(sh��)Ӌ(j��)[J]. �Ƽ���(j��ng)��(j��)��(d��o)��,2015,(18):105-106.
[15]���(y��ng),������,��߮. ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��PID����(sh��)����[J]. ��ӿƼ�,2016,(05):153-157.
[16]����h(hu��n),�·괺. ֱ��늙C(j��)�D(zhu��n)�ٿ���ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)[J]. �������Ƽ���Ϣ,2016,(16):99.
[17]���. �ضȿ���ֱ��늄�(d��ng)�C(j��)�D(zhu��n)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c����[J]. �Ƽ��c��(chu��ng)��,2016,(14):87+90.
[18]��ͮ. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)�]�h(hu��n)�{(di��o)�ٿ���ϵ�y(t��ng)[J]. �������,2016,(15):196-197.
[19]���μt,�T��܊,�S�A�w. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)����[J]. �Ƽ�չ��,2016,(28):117.
[20]���,��ʢ��. ���چ�Ƭ�C(j��)STC12C52ϵ��ֱ��늙C(j��)�{(di��o)��ϵ�y(t��ng)[J]. ɽ����Ӽ��g(sh��),2015,(05):3-4+7.
[21]�]�Αc,�S����,�{(l��n)����,�r(n��ng)�w,���@ʥ. ���چ�Ƭ�C(j��)��ֱ��늙C(j��)���ƅ���(sh��)�y(c��)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J]. �V���I(y��)���g(sh��)�W(xu��)Ժ�W(xu��)��(b��o),2015,(05):7-9.
[22]Ji You Fei,Hua Li,Bin Gao. Based on the Single Chip Microcomputer Atmega168 Robot Control System Design[J]. Applied Mechanics and Materials,2013,2516(341):.
[23]Jun Li Wan,Shi Run Cheng,Hao Liu. The Electronic Throttle PID Control System Based on Single Chip Microcomputer[J]. Applied Mechanics and Materials,2014,3458(631):.
[24]Ai Cheng Zou,Qun Ying Wang,Yi Jie Cao. Design of PWM DC Motor Control System Based on Single Chip[J]. Advanced Materials Research,2014,3470(1030):.
��� A ϵ�y(t��ng)��D

���u����W(xu��)Ժ���Ʈ��I(y��)Փ�ģ��O(sh��)Ӌ(j��)���_(k��i)�}��(b��o)�����΄�(w��)��(sh��)��
Փ���}Ŀ��
- ���(xi��ng)���x�}������(j��)���W(xu��)���(xi��)�������x�}�����x��Փ�Ļ��O(sh��)Ӌ(j��)�Ą�(chu��ng)���c(di��n)��
|
- �о�?j��)?n��i)�����W(xu��)���(xi��)����Ҫ�^�c(di��n)��M��Q��Ҫ��(w��n)�}���о�������
|
����ָ��(d��o)�̎���Ҋ(ji��n)
��(j��ng)���飬��ͬ�⡢��ͬ�⣩�_(k��i)�}��
������ ������ |
���u����W(xu��)Ժ���Ʈ��I(y��)Փ�ģ��O(sh��)Ӌ(j��)���Y(ji��)�}��(b��o)��
Փ���}Ŀ��
һ���n�}�����r��ָ��(d��o)�^(gu��)�̣��W(xu��)���(xi��)�� |
��һ��ָ��(d��o)�������� �����c(di��n)�� ��(n��i)�ݣ� |
�ڶ���ָ��(d��o)�������� �����c(di��n)�� ��(n��i)�ݣ� |
������ָ��(d��o)�������� �����c(di��n)�� ��(n��i)�ݣ� |
���Ĵ�ָ��(d��o)�������� �����c(di��n)�� ��(n��i)�ݣ� |
����ָ��(d��o)�̎�Փ�ģ��O(sh��)Ӌ(j��)���u(p��ng)����Ҋ(ji��n)���ɿ�(j��)��ָ��(d��o)�̎��(xi��)��
��ͬ�⡢��ͬ�⣩�Y(ji��)�}�� ����(j��)�����ٷ��ƣ�ָ��(d��o)�̎������� ������ |
����Ժϵ���I(y��)Փ�ģ��O(sh��)Ӌ(j��)��ָ��(d��o)ί�T��(hu��)������Ҋ(ji��n)�� ��(j��ng)���飬��ͬ�⡢��ͬ�⣩���Ӵ��q�� ���£�Ժϵ���£��� ������ |
���u����W(xu��)Ժ���Ʈ��I(y��)Փ�ģ��O(sh��)Ӌ(j��)�����q�u(p��ng)�ֱ�
�}Ŀ��
�u(p��ng)�Z(y��)�������qС�M�(xi��)�����ܷ��U��������(n��i)�ݺ��^�c(di��n)���Ƿ���Є�(chu��ng)���ԣ��ش��ᆖ(w��n)��r�� |
| | | | | |
| | | | |
| | | | |
| | | |
| | | |
| | | |
| ָ��(d��o)�̎��u(p��ng)���ɿ�(j��) ����(qu��n)��50%�� | ���q�ɿ�(j��) ����(qu��n)��50%�� | |
| | |




 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��