|
|
HC-SR04 ��һ����� STC11ϵ�� (SOP14���b) ��Ƭ�C(j��)���Ƶij����y��ģ�K���乤��ԭ���ǣ�TRIG���_�������� 10us �ĸ��ƽ�|�l(f��)��̖����(n��i)�� STC11 �(q��)��̽�^�l(f��)�� 8 ��(g��) 40kHz �����������ϵK�ﷵ�غ���̽�^�z�y���� ECHO ���_ݔ���c�����r(sh��)�g��ȵĸ��ƽ��ͨ�^ L=(t x V)/2 Ӌ(j��)����x��
���Ĺ���ԭ��Ԕ�⣺
�|�l(f��)�y�ࣺ �ⲿ��Ƭ�C(j��)�oģ�K�� Trig ���_һ��(g��)��С�� 10us �ĸ��ƽ��̖��
�l(f��)�䳬���� ģ�K��(n��i)���� STC11 ��Ƭ�C(j��)�����ԄӮa(ch��n)�� 8 ��(g��) 40kHz �ķ������У�ͨ�^�l(f��)��̽�^����l(f��)�䡣
���շ�����̖�� ��(d��ng)���������ϵK�ﲢ�����r(sh��)������̽�^�����յ���̖��STC11 ����ʹ Echo ���_�����ƽ��
Ӌ(j��)����x��Echo ���ƽ���m(x��)�r(sh��)�g = ���������r(sh��)�g t��
Ӌ(j��)�㹫ʽ�� ���x L = (���ƽ�r(sh��)�g x ��(340m/s)) /2��
�ٿɰ��s 340m/s(0.034cm/us) Ӌ(j��)�㡣
�y����(x��)��(ji��)�� ���h�y�����ڴ��� 60ms���Ա���l(f��)����̖Ӱ푻�푽��ա�
STC11 (SOP14) �����ã�
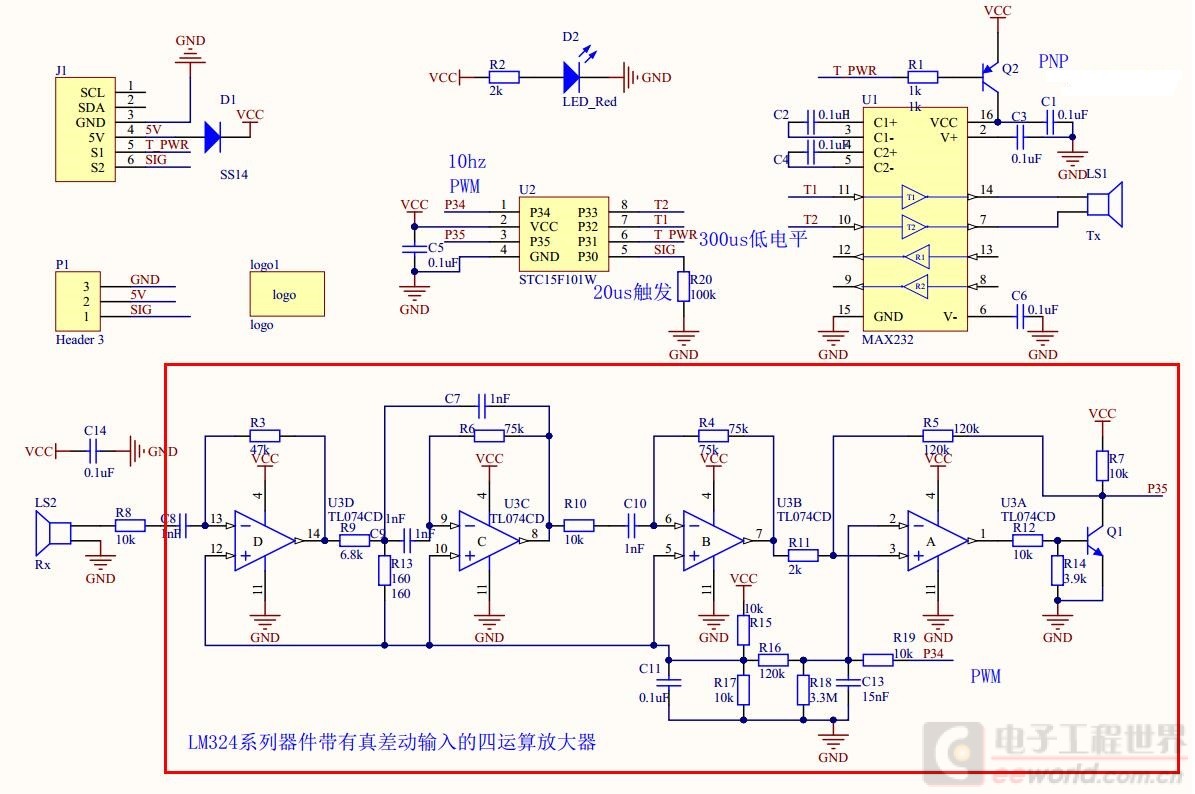
HC-SR04 ���d�� STC11 ��Ƭ�C(j��)ؓ(f��)؟(z��)�(q��)��̽�^�l(f��)�ͳ������z�y������̖�������_Ӌ(j��)�r(sh��)ݔ������(y��ng)�r(sh��)�g�L�ȵ� Echo ��̖���������ʽ�·�еČ���ģ�M�·������˜y�����Ⱥͷ�(w��n)���ԡ�
�D�� 14 �_ STC11 �ĸ��_����
STC11F/10Fxx �� 8051 ��(n��i)��ϵ�У��ж�N���b��14 ���_С���bһ��ֻ�������� P5/P6/P4/P3/P6 �ھ����Դ���r(sh��)犡���(f��)λ��
�Y(ji��)�����ԭ��D�zӡ��(bi��o)ע��������(y��ng)�P(gu��n)ϵ���£������ҡ����ϵ��°���D��Ĺ��_̖����
���_ 1��P50��ͨ�� I/O��������(sh��)��ݔ�룬ģ�K�� Trig ���_����
���_ 2��P67��ͨ�� I/O�� ECHO ���_ݔ���c�����r(sh��)�g��ȵĸ��ƽ����
���_ 3��P66��ͨ�� I/O�������A(y��)��/δ�á�
���_ 4��VDD��+5V �Դ�_����
���_ 5��P65��ͨ�� I/O����D�нӵ�������һ��(c��)��̖���ϣ��ṩоƬ�Ĺ����r(sh��)犡�
���_ 6��P64��ͨ�� I/O����P65��P64�ӵľ����ṩоƬ�Ĺ����r(sh��)�
���_ 7��P63 / RST����(f��)λ�_��ͬ�r(sh��)Ҳ�����Þ� P4.7 ֮�һ�� I/O���D�нӵ���늏�(f��)λ/���I�·��������ϵ�y(t��ng)��(f��)λ����
�҂�(c��)���У�
���_ 8��P62��ͨ�� I/O�������A(y��)��/δ�á�
���_ 9��P61��ͨ�� I/O���D���B�����ģ�M/���^�·�������ɘӻ���ƣ���
���_ 10��P60��ͨ�� I/O�����ܿ��ܽ� HC‑SR04 �� ECHO����(j��ng)������/���^�·�M(j��n)�� TL074 �ٻص� MCU����
���_ 11��VSS��GND �Դ�أ���
���_ 12��P53��ͨ�� I/O�������Դ�ӵ�MAX232оƬ���Á��a(ch��n)�� 40 kHz ��������(j��ng)�^�ƽ�D(zhu��n)�Q�ͱ������(q��)�Ӱl(f��)��̽�^��
���_ 13��P52��ͨ�� I/O��ʹ��MAX232��늉��D(zhu��n)�Q���(q��)�ӳ����l(f��)��̽�^
���_ 14��P51��ͨ�� I/O��MAX232 �(q��)�Ӱl(f��)��Q����
ֱ��ʹ�Æ�Ƭ�C(j��)��IO�ǟo���õ���(qi��ng)���(q��)����̖�ġ�����ͨ�ij���ģ�K�У���һ�N�����������ʹ����MAX232оƬ���(q��)�ӳ����l(f��)���^�ġ���MAX232�м����˃�·RS232��̖�l(f��)������оƬ����ͨ�^����_�P(gu��n)��ʽ������늉�5V�����ͷ����γ�����ؓ(f��)10V���Դ��ʹ��MAX232������̽�^�M(j��n)�в���(q��)�ӣ����ԫ@�õ�Ч��ؓ(f��)20V���(q��)����̖���@�ӿ��ԫ@�ú�(qi��ng)��ݔ����̖��
|
|


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664




 ͣ�a(ch��n)�ˣ�ɶ������ϖ|���˓Qһ��(g��)��һ�c(di��n)�Ć�Ƭ�C(j��)��ѽ
ͣ�a(ch��n)�ˣ�ɶ������ϖ|���˓Qһ��(g��)��һ�c(di��n)�Ć�Ƭ�C(j��)��ѽ