�S����Ӽ��g(sh��)�İl(f��)չ�����N���ӵ�ϵ�y(t��ng)Խ��Խ�ӽ��Ԅӻ��ˣ���ϵ�y(t��ng)�O(sh��)Ӌһ�ײ�����������ϵ�y(t��ng)�������˹���ϵ�y(t��ng)������Q�����ٶȲ�ͬ���Ć��}����ʹ���������dz����㣬�ܴ��������|(zh��)����Ч�ʡ�
ԓϵ�y(t��ng)��Atmel��˾���a(ch��n)��AT89S52��Ƭ�C����ģ�����ISD4004�����Z���惦оƬ�����F(xi��n)�L�r�g�Ĵ惦�Z��������MC3479�(q��)�Ӳ��M늙C���ʴ_���
���Ч��������ϵ�y(t��ng)��ȫ�ԄӵČ��F(xi��n)���죬ͬ�r����Z�����ţ����з��㌍�Ãrֵ������һ����(j��ng)���rֵ��
2ϵ�y(t��ng)�����O(sh��)Ӌ 1
2.1 ϵ�y(t��ng)���w����
2.2 ϵ�y(t��ng)���ܽ�B 2
2.3 ����оƬ��B 2
3 Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ 3
3.1Ӳ���O(sh��)Ӌ˼· 3
3.2ģ�K�·�O(sh��)Ӌ 3
3.2.1�@ʾģ�K 4
3.2.2�Z��ģ�K 5
3.2.3�Z���Ŵ�ģ�K
3.2.4늙C�(q��)��ģ�K 6
3.2.5�Դģ�K 7
3.2.6����ģ�K 8
4 ܛ��ϵ�y(t��ng)���O(sh��)Ӌ
4.1 ܛ��ϵ�y(t��ng)�M��
4.2�I�P�@ʾܛ���O(sh��)Ӌ
4.3���M늙C�����O(sh��)Ӌ 10
4.4�Z�������O(sh��)Ӌ 11
5 ���Y(ji��) 12
���1ϵ�y(t��ng)ԭ��D 14
���2ϵ�y(t��ng)����ܛ�� 15
���3ϵ�y(t��ng)����D 19
��ϵ�y(t��ng)��Atmel��˾���a(ch��n)��AT89S52��Ƭ�C�����,���F(xi��n)�����Ԅ������^�̣�Ó�x�˂��y(t��ng)���˹���ֻ����ư��I�Ϳ������ȫ�^�̣��������㡢��ݡ�ϵ�y(t��ng)�����Rȫ���ȿɮ�(d��ng)�����ϵ�y(t��ng)�ṩ�o�W(xu��)���ã����У�����ʹ�ã��ֿ����Ӳ���Ӳ����(g��u)���������I(y��)��(y��ng)�îa(ch��n)Ʒ��ϵ�y(t��ng)���Ԍ��F(xi��n)�҃�(n��i)���Ԅ����졢��Q����ڲ����r���IJ��㣬��ɕr�ˆβ������Ρ����ң��҂��ڌ��H�O(sh��)Ӌ��߀�A(y��)���˺ܶ�Ĺ��ܽӿڣ��Ա���ϵ�y(t��ng)���ܵĔUչ�������Â������z�y�h(hu��n)��׃�����F(xi��n)�Ԅӻ�����ˣ�ϵ�y(t��ng)��ʹ���ԺͶ���Եõ��˺ܺõ��w�F(xi��n)��
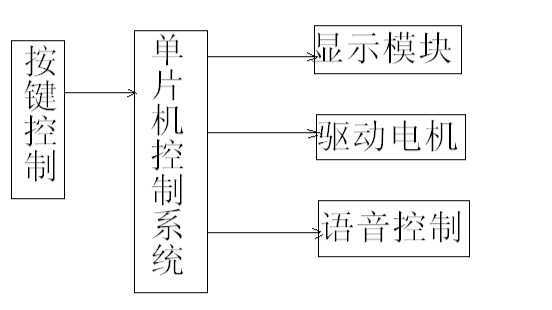
2.1 ϵ�y(t��ng)���w���� ��ϵ�y(t��ng)���_�l(f��)�Ԟ��Ƭ�C����ƺ��ģ��C�Ͽ��]�ˆ�Ƭ�C�����ܡ�ϵ�y(t��ng)�ɱ���ʹ����Ⱥ�ȷ�������ء�ͬ�rҲ�Z�����ŵ�Ч�����O(sh��)Ӌ��һ�N��(j��ng)���������ҹ����������ϵ�y(t��ng)��ϵ�y(t��ng)��JTAG�ӿڡ��Z���طš��I�P���@ʾ�����ʷŴ��ģ�K��(g��u)�ɡ�ϵ�y(t��ng)��D��D2.1��ʾ��
�D2.1 2.2 ϵ�y(t��ng)���ܽ�B ͨ�^���Ϸ�����ϵ�y(t��ng)�܉�������¹��ܣ��I�Pݔ�룬�I�P��һ��ϵ�y(t��ng)����罻���Ę������I�P�����F(xi��n)���I�P�Ŀ��Ƶ�ݔ�룻�@ʾ�����I�Pһ�ӣ��@ʾģ�K���˙C�����r�l(f��)�]�����ɺ�ҕ�����ã�ԓ��������ˆ�Ƭ�Cϵ�y(t��ng)��(n��i)����(sh��)��(j��)��ݔ���@ʾ���Z�������������в���ȱ�ٵIJ��֣�ͨ�^ISD4004���F(xi��n)�Z���ĻطŹ��ܣ�����ϵ�y(t��ng)���Z��оƬݔ�����ʴ�С����ͨ�^TDA2030�Z���Ŵ�ģ�K���F(xi��n)�Z���ķŴ�(y��ng)������ݔ����ͬ�r����MC3479оƬ�(q��)�Ӳ��M늙C�����F(xi��n)�Ԅ������Ч����ͨ�^�����M늙C�Ŀ��ƣ����Ԝʴ_�Č��F(xi��n)���߶ȵĿ��ƣ�ͨ�^��늙C��Ӌ����Ԍ��F(xi��n)���߶ȵĜy�����Ա��@ʾ��(d��ng)ǰ�ĸ߶ȡ�
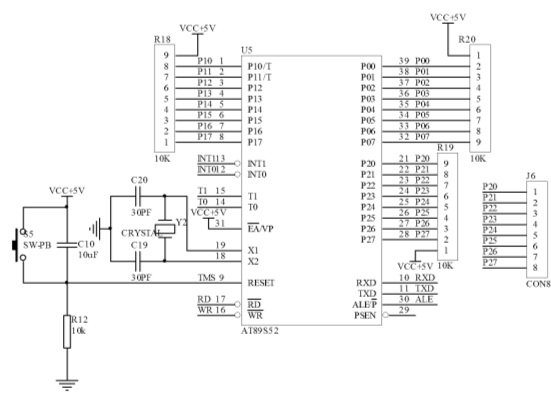
2.3 ����оƬ��B ���O(sh��)Ӌ���õĆ�Ƭ�C��Atmel��˾���a(ch��n)��AT89S52��Ƭ�C������һ�����ģ�������CMOS 8λ��Ƭ�C��Ƭ��(n��i)��4k Bytes ISP�Ŀɷ���(f��)����1000�ε�Flashֻ�x����惦������������Atmel��˾�ĸ��ܶȡ�����ʧ�Դ惦���g(sh��)���죬���ݘ˜�MCS-51ָ��ϵ�y(t��ng)��80C51���_�Y(ji��)��(g��u)��оƬ��(n��i)������ͨ��8λ����̎������ISP Flash�惦��Ԫ��AT89S52�����������c��40�����_��4k Bytes FlashƬ��(n��i)����惦����128 bytes���S�C��ȡ��(sh��)��(j��)�惦����RAM����32���ⲿ�p��ݔ��/ݔ����I/O���ڣ�5���Д���(y��u)�ȼ�2���Д�Ƕ���Д࣬2��16λ�ɾ��̶��rӋ��(sh��)��,2��ȫ�p������ͨ�ſڣ����T����WDT���·��Ƭ��(n��i)�r���ʎ���� ���⣬AT89S52�O(sh��)Ӌ����������ʎ�l�ʿɞ�0Hz����ͨ�^ܛ���O(sh��)��ʡ�ģʽ�����eģʽ�£�CPU��ͣ��������RAM���rӋ��(sh��)�������пڣ����Д�ϵ�y(t��ng)���^�m(x��)���������ģʽ���Y(ji��)��ʎ��������RAM�Ĕ�(sh��)��(j��)��ֹͣоƬ��������ֱ�����Д༤���Ӳ����(f��)λ��ͬ�rԓоƬ߀����PDIP��TQFP��PLCC�����N���b��ʽ�����m��(y��ng)��ͬ�a(ch��n)Ʒ������
3 Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ 3.1Ӳ���O(sh��)Ӌ˼· ��ӭ�ϱ��a(ch��n)Ʒ���O(sh��)ӋĿ�ģ��҂���Atmel��˾���r��AT89S51/52����ģ��혋(g��u)��һ�����r���Ԅӿ���ϵ�y(t��ng)��Ҫ����������Ա�ϵ�y(t��ng)�����ð��I�������Ԍ��F(xi��n)�������Σ����O(sh��)Ӌ���㣬��ģ�K���O(sh��)Ӌ���O(sh��)һ�K��ģ�K�����Ɍ����ģ�K����ģ�K�����_�M�����ýӿ�����������(j��)ϵ�y(t��ng)��Ҫ���������ģ�K�ϲ����㌍�F(xi��n)���x������(y��ng)����ģ�K�c��ģ�K���ϣ��M�Ќ�ϵ�y(t��ng)Ҫ��Ҫ�����_���O(sh��)Ӌ˼·��������ģ�K��ȫ���ԣ����]����ģ�K�ϱ�����ռI/O���·��ͬ�r��������������ģ�K���O(sh��)Ӌ���·���ְ���ģ�K�O(sh��)Ӌ���@�ӵ��O(sh��)Ӌ��ʹ�·������������ֻҪ��������(y��ng)���·��ģ�K���ɡ���ϵ�y(t��ng)���O(sh��)Ӌ�Ą�(chu��ng)���cҲ���ڴˡ�����ϵ�y(t��ng)�ķ����ԡ�
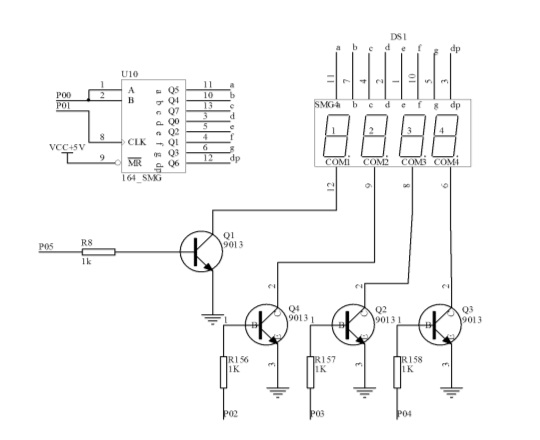
3.2ģ�K�·�O(sh��)Ӌ 3.2.1 �@ʾģ�K �I�P���@ʾ������һ������ϵ�y(t��ng)����Ҫ���֣�ͬ�rҲ�����y����һ���֡��ڱ�ϵ�y(t��ng)�У����˹�(ji��)�s�˿ڣ�ͬ�r���������ͱ��Cϵ�y(t��ng)�����ķ�(w��n)���ԣ��҂��������I�P�͂���ݔ�룬����ݔ��оƬ74LS164���ṩ���ˡ���������ԭ������D3.2.1���£�
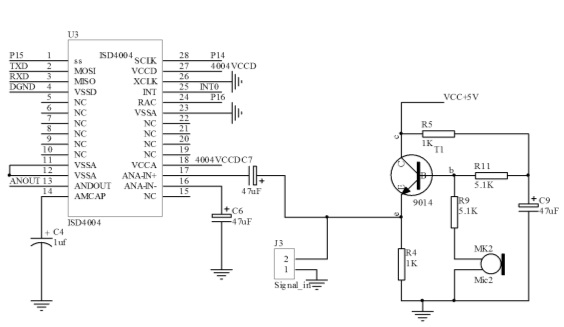
�D3.2.1 3.2.2 �Z��ģ�K ϵ�y(t��ng)�����Z���ط�оƬISD4004�� ISD4004ϵ�й���늉�3V,��Ƭ䛷ŕr�g8��16���,���|(zh��)��,�m�����Ƅ��Ԓ��������yʽ��Ӯa(ch��n)Ʒ�С�оƬ����CMOS���g(sh��),��(n��i)����ʎ�����������V������ƽ���V���������l�Ŵ������Ԅ��o�뼰���ܶȶ��ƽ�W�q���A��С�оƬ�O(sh��)Ӌ�ǻ������в������������������,���������ͨ�^����ͨ�Žӿ�(SPI��Microwire)���롣оƬ���ö��ƽֱ��ģ�M���惦���g(sh��), ÿ���ɘ�ֱֵ�Ӵ��A��Ƭ��(n��i)�W�q���A����,����܉�dz��挍����Ȼ���٬F(xi��n)�Z�������������{(di��o)��Ч��,������һ����w����·�������͉��s��ɵ���������"����"���ɘ��l�ʿɞ� 4.0,5.3,6.4,8.0kHz,�l��Խ��,䛷ŕr�gԽ�L,�����|(zh��)�t�����½�,Ƭ��(n��i)��Ϣ�����W�q���A����,���ڔ����r�±���100��(����ֵ),����(f��)���10�f�Ρ����挦ISD4004�����_�f������ݔ������Ξ�:SS,MOSI,MISO,RAC,INT,SCLK,VCC,GND�� Ƭ�x��SS�����˶˞�ͣ�����ԓISD4004 оƬ�l(f��)��ָ��ɗlָ��֮�g����ƽ�� ����ݔ�루MOSI�����˶˞鴮��ݔ��ˣ�����������(y��ng)�ڴ��Еr�������֮ǰ�낀���ڌ���(sh��)��(j��)�ŵ����ˣ���ISD ݔ�롣 ����ݔ����MISO����ISD �Ĵ���ݔ���ˡ�ISD δ�x�Еr�����˳ʸ���B(t��i)�� ���Еr犣�SCLK����ISD �ĕr�ݔ��ˣ������������a(ch��n)��������ͬ��MOSI ��MISO �Ĕ�(sh��)��(j��)��ݔ�� ��(sh��)��(j��)��SCLK �������i�浽ISD�����½����Ƴ�ISD�� �е�ַ�r犣�RAC����©�O�_·ݔ����ÿ��RAC ���ڱ�ʾISD �惦���IJ����M����һ�У�ISD4004ϵ���еĴ��A����2400 �У���ԓ��̖���ָ��ƽ�ĕr�g��175ms�����ƽ�r�g��25ms���ڿ��Mģʽ��RAC �ɱ��ָ��ƽ218.75��s�����ƽ31. 25��s��ԓ�˿����ڴ惦�������g(sh��)�� �ДࣨINT�������˞�©�O�_·ݔ����ISD ���κβ������������M���Йz�y��EOM��IVF �r������׃�Ͳ����֡��Д��B(t��i)����һ��SPI�����_ʼ�r������Д��B(t��i)Ҳ����RINT ָ���xȡ�� ISD�Ĺ���늉���3V��ģ�K�м��˷։��·���Դݔ��5V�� ��̖ݔ���Ѓɂ��˿ڣ�һ����MICݔ�룬��һ����ģ�M��ֱ̖��ݔ�롣ģ�K���Æζ�ݔ�룬��̖��������ݔ�룬�����Ȟ���ֵ32mV�� ��ԭ��D3.2.2���£� �D3.2.2
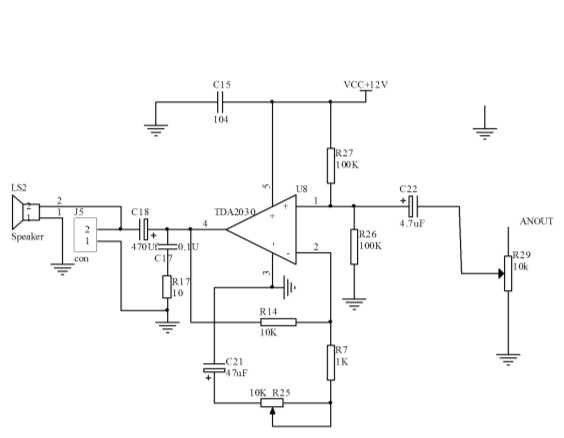
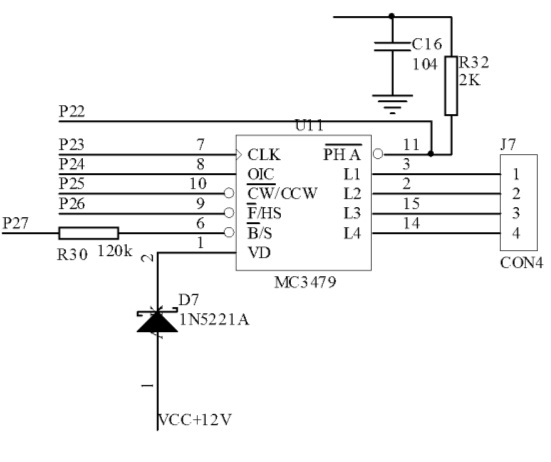
3.2.3 �Z���Ŵ�ģ�K ��ϵ�y(t��ng)�����Z���Ŵ�оƬTDA2030����ԭ����D3.2.3��ʾ�£� �D3.2.3 3.2.4 늙C�(q��)��ģ�K ϵ�y(t��ng)����MC3479���(q��)�Ӳ��M늙C�����挦MC3479���(q��)��ģ�K�������f����MC3479�m�����(q��)�Ӄ���늙C(�ľ�������,�����m�����ľ���)����ģ�K�����(q��)���҂�����҃����ľ���42BYGH103늙C������ҵ�����늙C߀��Ҫ�{(di��o)��һ�½Ӿ������уɂ����^�ҿա�ԓоƬݔ���TTL�� CMOS ���ݡ� P1_0ݔ�����ƽ�r늙C���D(zhu��n)��ݔ�����ƽ�r���D(zhu��n)��P1_1ݔ�����ƽ�rȫ���\�У����ƽ�r�벽�\�С�ͨ�^�xP1_2������ƽ����֪��늙C�\�е���ʼA���B(t��i)��P1_3ݔ���迹�x����ƶ�(ֻ�ڰ벽��ʽ��Ч) , ݔ����ƽ�rݔ���˞���迹?f��n)�B(t��i), ݔ����ƽ�rݔ���˞���迹?f��n)�B(t��i)��P1_7ݔ��һ�����ƽ���ɰ�늙C��λ���rA���ʼ��B(t��i),���Ǐ�(f��)λ��ÿ���\��ǰ����ȏ�(f��)λ,��ʹ�\�и����_����P1_7��6�_֮�g��(li��n)�������Դ_��оƬ��ݔ����������P(gu��n)ϵ�顣
�҂���ģ�K���O(sh��)��R=120K����ݔ�������109mA��P1_5��r�ݔ�롣ȫ����B(t��i)�r,ÿ���r�늙C�\��һ��,����l��833Hz���벽��B(t��i)�r��ÿ���r�늙C�\�а벽������l��1250Hz�� ��(y��ng)���е�ע���c��
1�����M늙C��(y��ng)���ڵ��و���---ÿ����D(zhu��n)�ٲ����^1000�D(zhu��n)����0.9�ȕr6666PPS)�������1000-3000PPS(0.9�ȣ��gʹ�ã���ͨ�^�p���b��ʹ���ڴ��g�������˕r늙C����Ч�ʸߣ������͡�
2�����M늙C��ò�ʹ��������B(t��i)��������B(t��i)�r��Ӵ�
3�����ښvʷԭ��ֻ�И˷Q��12V늉���늙Cʹ��12V�⣬����늙C��늉�ֵ�����(q��)��늉���ֵ���ɸ���(j��)�(q��)�����x���(q��)��늉������h��57BYG����ֱ��24V-36V��86BYG����ֱ��50V,110BYG���ø���ֱ��80V������(d��ng)Ȼ12����늉���12V�㉺�(q��)����Ҳ���Բ��������(q��)���Դ�����^Ҫ���]������
4���D(zhu��n)�ӑT�����ؓ�d��(y��ng)�x���C��̖늙C��
5��늙C���^���ٻ��T��ؓ�d�r��һ�㲻�ڹ����ٶ����ӣ���������u���l���٣�һ늙C��ʧ���������Ԝp������ͬ�r�������ֹͣ�Ķ�λ���ȡ�
6���߾��ȕr����(y��ng)ͨ�^�Cе�p�١����늙C�ٶ�,����ø��֔�(sh��)���(q��)��������Q��Ҳ���Բ���5��늙C�����^������ϵ�y(t��ng)�ăr���^�F�����a(ch��n)�S���٣��䱻��̭���f��������Ԓ��
7��늙C����(y��ng)����Ӆ^(q��)��(n��i)������������횿�ͨ�^��׃늉���������һЩ����Ľ�Q��
8��늙C��600PPS��0.9�ȣ����¹�������(y��ng)����С�������늸С���늉����(q��)�ӡ� ��ԭ��D���£� �D3.2.4 3.2.5 �Դģ�K ����ϵ�y(t��ng)��Ҫ��ͬ�Ĺ���늉�����˱�ϵ�y(t��ng)���öව(w��n)��оƬ�팍�F(xi��n)��늉�������ͨ�^L7812�õ���(w��n)����+12Vݔ������(j��ng)�^�V����ݔ�뵽L7805���F(xi��n)+5V늉�ݔ��������ISD4004������+3V늉�������ϵ�y(t��ng)��(j��ng)�^LM317���{(di��o)��(w��n)��ݔ��+3V늉�����ԭ��D���£� �D3.2.5 3.2.6 ����ģ�K ϵ�y(t��ng)����AT89S52�������ģ�K��ԓоƬǰ���ѽ�(j��ng)����Ԕ�����f�����@���Ե�оƬ���f������ԭ��D���£� �D3.2.6
4 ܛ��ϵ�y(t��ng)���O(sh��)Ӌ
4.1 ܛ��ϵ�y(t��ng)�M�� ͨ�^��(y��ng)��C51�����O(sh��)Ӌ�Ļ������Z���Ϳ��Ƴ���ģ�KԴ����ij����O(sh��)Ӌ����ģ�K��ʾ���������O(sh��)ӋĿ�ģ�����I/O�ڌ�ͨ�^��Ƭ�C���ڵ�ݔ�롢ݔ���������c���Д���(y��u)�ȼ��ȣ����F(xi��n)����ϵ�y(t��ng)�Ŀ��ơ��I�P���裬�����˽������������F(xi��n)���Ʋ������Z�����Ƴ������������ٷ�����ԭ����늙C���Ƴ��������Ȍ�늙C��ʼ����Ȼ��늙C���F(xi��n)�D(zhu��n)�ٵĿ��ơ��@ʾ����ͨ�^��Ӌ���ϵ�y(t��ng)���D(zhu��n)��(sh��)��Ȼ���D(zhu��n)����߶ȣ�ͨ�^�����͔�(sh��)�@ʾ�� ���г�������ؘ�C�Z�Ծ��������������m��(d��ng)?sh��)�עጣ������˳���Ŀ��x�ԺͿ���ֳ�ԡ�
4.2 �I�P�@ʾܛ���O(sh��)Ӌ 74LS164��һƬ���д��нӿ�ݔ�룬���нӿ�ݔ����оƬ��ͨ�^�Ĵ����B�m(x��)��8����(sh��)��(j��)���˕r�IJ���ݔ����(sh��)��(j��)����(sh��)�a���@ʾ��������D��4.2.1����ʾ�� �D4.2.1
4.3 ���M늙C�����O(sh��)Ӌ ϵ�y(t��ng)ͨ�^��MC3479�IJ����팍�F(xi��n)��늙C���ƣ����ȳ���?q��)�MC3479��ʼ�������䌦��(y��ng)�����_���λ��늙C�ȏ�A��λ�_ʼ�D(zhu��n)�ӡ��Ա㌦�D(zhu��n)��(sh��)��Ӌ�㣬�Զ��෴��(y��ng)ʽ���M늙C���������Ķ������ж��ŘO��ÿһ���ŘO���@��һ���@�M���@�Mͨ늕r���@�ɂ��ŘO�ĘO���෴�������@�M�ӳ����Σ��D(zhu��n)���F�ļ����ӘOѥ����С�X�����D(zhu��n)���X��ͨ����ȡ��D(zhu��n)���F���ϛ]���@�M���D(zhu��n)�Ե��X��(sh��)��40�������ɂ��X֮�g�A�Ǟ�9o����(d��ng)ijһ���@�Mͨ늕r�����ڶ��D(zhu��n)�������X�Ͳۣ����Ԯ�(d��ng)�D(zhu��n)���X������λ�ò�ͬ�r���ڴň��������£��D(zhu��n)�ӌ��D(zhu��n)��һ���Ƕȣ�ʹ�D(zhu��n)�ӺͶ��ӵ��X����R���@����ʹ���M늙C���D(zhu��n)��ԭ�� ���M늙C���\�D(zhu��n)ʼ���}�_��̖����.ͨ�^��׃����ͨ늵Ĵ�������{(di��o)�����M늙C���\�D(zhu��n)������D4.3.1�鲽�M늙C���̈D�� �D4.3.1���M늙C�������̈D
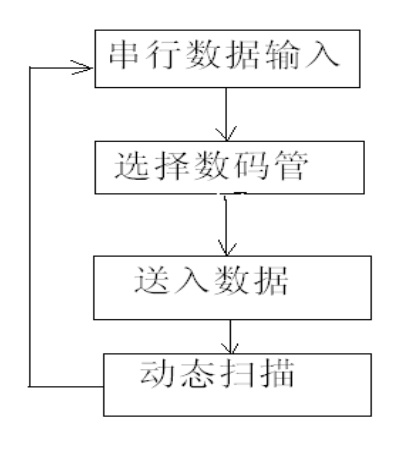
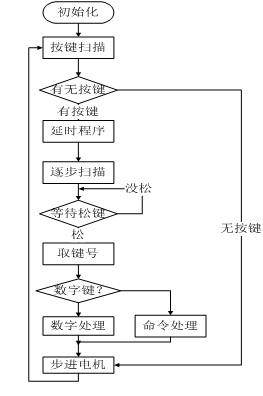
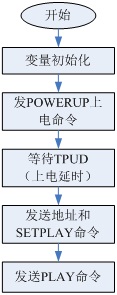
4.4 �Z�������O(sh��)Ӌ ϵ�y(t��ng)�����Ȍ�ISD4004��ʼ���ȏĵ�ַ0000H�_ʼ��������m(x��)һ�Εr�g����(j��)���Ʋ������F(xi��n)����������������_ʼ����ĵط����B�m(x��)�IJ��ţ�ֱ������ֹͣ��������tһֱ������ȥ��ֱ�����һ�������ַ����������D���£� �D4.4.1 5 ���Y(ji��)���_�l(f��)ϵ�y(t��ng)����Atmel��˾���a(ch��n)��AT89S52��Ƭ�C����ģ�ͨ�^�Z���c늙C�(q��)���cһ�w���Y(ji��)��(g��u)�Uչ����ģ�K�����÷��_�O(sh��)Ӌ�����_�{(di��o)ԇ��Ȼ�����M�����C�{(di��o)ԇ�����ϵ��_�l(f��)��ʽ���ɹ��Č��F(xi��n)�˸����ܡ��mȻ��ϵ�y(t��ng)�ڹ��܌��F(xi��n)��������������ã����_�l(f��)ϵ�y(t��ng)߀����һЩ���㣬�磺�]�к������Â������ȡ� ��֮��ԓ���ϵ�y(t��ng)߀�����S���ȡ֮̎�ģ��Y(ji��)��(g��u)���ζ������S���� ��(j��ng)�^�˴�Ӳ��ϵ�y(t��ng)���O(sh��)Ӌ�����H�����W(xu��)���I(y��)֪�R얹̺ͼ�����һ�飬����Ҫ����������Լ��Ĺ��̑�(y��ng)�������ͿƼ�Փ����ˮƽ��ͬ�r��������w�����H�H������Փ֪�R���h�h����ģ�ֻ���ڌ��`�в���̽�������������w������Փ�ľ��A���ڣ�ֻ�Ќ���Փ�͌��`�ЙC�ĽY(ji��)��������������������֪�R��
��Ƭ�CԴ����:
- #include "reg51.h"
- #include "intrins.h"
-
- sbit _cs = P1^6;
- sbit _sclk= P1^5;
- sbit _mosi= P3^1;
- sbit _miso= P3^0;
- sbit _rac = P1^7;
- sbit _int = P3^2;
-
-
- void delay(unsigned int i) //�ӕr����
- {
- while(i--);
- }
-
- void stopmode() //ֹͣ
- {
- unsigned char m,i,j;
- _cs=1;
- _sclk=0;
- _cs=0;
-
- m=0x30;
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- _cs=1;
- }
- void powerdown() //���
- {
- unsigned char m,i,j;
- _cs=1;
- _sclk=0;
- _cs=0;
-
- m=0x10;
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- _cs=1;
- }
-
- void powerup() //���
- {
- unsigned char m,i,j;
- _cs=1;
- _sclk=0;
- _cs=0;
-
- m=0x20;
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- _cs=1;
- }
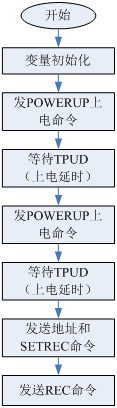
- void record4004(unsigned int address) //��� address--�����ַ 0---2400
- {
- unsigned char i,m,j;
- unsigned int datasoute=0;
-
-
- powerup();
- delay(5118);//����ӕr
- powerup();
- delay(5118);//����ӕr
- delay(5118);//����ӕr
- _cs=1;
- _sclk=0;
- m=0xa0;
- _cs=0;
- for(i=0;i<16;i++)
- {
- address=_iror_(address,1);
- datasoute=address<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- _cs=1;
- _sclk=0;
- m=0xb0;
- _cs=0;
-
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _mosi=CY;
- _sclk=0;
- _sclk=1;
- }
- _cs=1;
- P0=0xff;
- datasoute=0;
- while(_int==1) //�惦��ַ�Q�И�־
- {
- if(_rac) {delay(20000); datasoute++; } //ӛ䛱��������ռ���Д�(sh��)��Ҳ���DZ�������ж��
- if(P1^3==0)break;
- }
- }//while end;
-
- void audioout(unsigned int address) //��������
- {
- unsigned char i,m,j;
- unsigned int datasoute;
-
- powerup();
- _cs=1;
- _sclk=0;
- _cs=0;
- m=0xe0;
- for(i=0;i<16;i++)
- {
- address=_iror_(address,1);
- datasoute=address<<1;
- _sclk=0;
- _mosi=CY;
- _sclk=1;
- }
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _sclk=0;
- _mosi=CY;
- _sclk=1;
- }
-
- _cs=1;
- _sclk=0;
- m=0xf0;
- _cs=0;
- for(i=0;i<8;i++)
- {
- m=_cror_(m,1);
- j=m<<1;
- _sclk=0;
- _mosi=CY;
- _sclk=1;
- }
- _cs=1;
-
- P0=0xff;
- while(_int==1)
- {;
- }//while end;
- }
���3ϵ�y(t��ng)������D
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664