|
發布時間: 2017-11-19 17:11
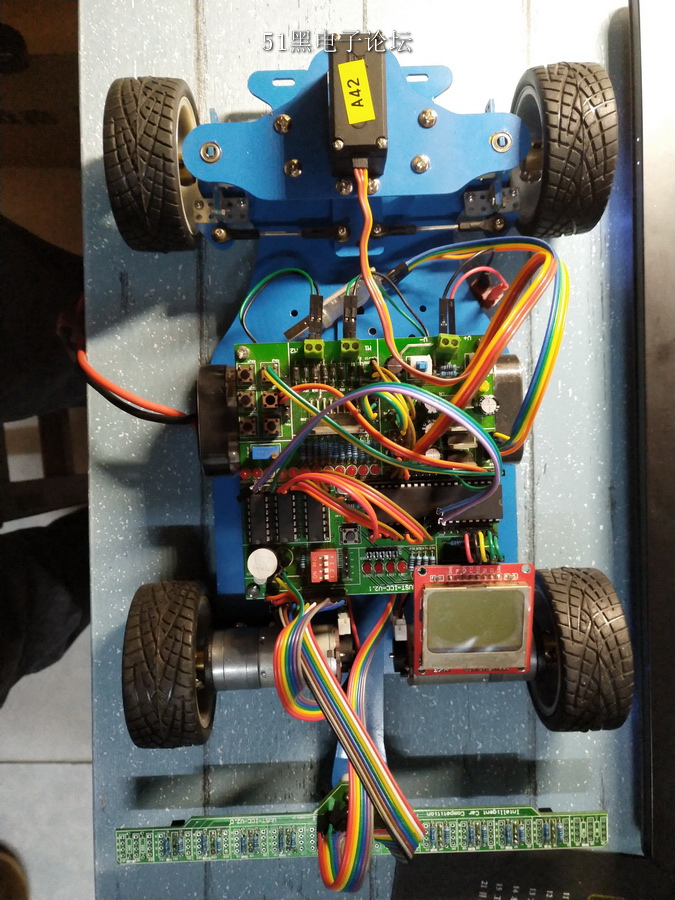
正文摘要:我智能小車做了一個前輪光電管尋跡后輪舵機控制轉向 ,兩個模塊大概相距25cm,導致我轉向總是過頭無法提起速度,這種有沒有什么好的算法解決這種問題啊 |
HC6800-ES-V2.0 發表于 2017-11-20 08:23 我也發現了 感覺這種模式電機差速控制效果要好于舵機控制 我嘗試先給電機一個給定的速度 利用光電管的偏差值error轉換一下來+-這個定值從而改變他們的差速,但是感覺找不到一個比較好的轉換公式 |
|
個人意見: 舵機的精度不夠、反應速度太慢,這個尋跡調方向,不適用舵機。 其實只要控制好了兩后輪的轉動快慢,就可以調方向了,多數小車都是這樣控制方向的。 控制車輪速度快慢,就是用PWM波,即“占空比”調節,這個網上很多內容,自己可以查找。 要精確控制車輪的速度及調節,有一個算法——PID,我也在學習中。 |
 收藏
收藏 頂
頂 踩
踩

