亚洲春色中文字幕久久久-三上亚,一吻二脱三床四吻胸,国产真实伦对白视频全集,在线毛片观看,精品成品入口黄网,国产毛aⅴ片久久久,亚洲AV色香蕉一区二区三区老师,萧皇后A级艳片,色情日本视频更新,99久久亚洲精品日本无码
標題:
詳解51單片機控制步進電機
[打印本頁]
作者:
piaolin
時間:
2015-10-3 01:11
標題:
詳解51單片機控制步進電機
接觸單片機快兩年了,不過只是非常業余的興趣,實踐卻不多,到現在還算是個初學者吧。這幾天給自己的任務就是搞定步進電機的單片機控制。以前曾看過有關步進電機原理和控制的資料,畢竟自己沒有做過,對其具體原理還不是很清楚。今天從淘寶上買了一個EPSON的UMX-1型步進電機,此步進電機為雙極性四相(后來才知道,四相和兩相步進沒什么區別的!!),接線共有六根,外形如下圖所示:
拿到步進電機,根據以前看書對四相步進電機的了解,我對它進行了初步的測試,就是將5伏電源的正端接上最邊上兩根褐色的線,然后用5伏電源的地線分別和另外四根線(紅、蘭、白、橙)依次接觸,發現每接觸一下,步進電機便轉動一個角度,來回五次,電機剛好轉一圈,說明此步進電機的步進角度為360/(4×5)=18度。地線與四線接觸的順序相反,電機的轉向也相反。
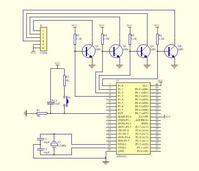
如果用單片機來控制此步進電機,則只需分別依次給四線一定時間的脈沖電流,電機便可連續轉動起來。通過改變脈沖電流的時間間隔,就可以實現對轉速的控制;通過改變給四線脈沖電流的順序,則可實現對轉向的控制。所以,設計了如下電路圖:
C51程序代碼為:
代碼一
#include
<AT89X51.h>
static unsigned int
count;
static unsigned int
endcount;
void
delay();
void
main(
void
)
{
count = 0;
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
EA = 1;
//允許CPU中斷
TMOD = 0x11;
//設定時器0和1為16位模式1
ET0 = 1;
//定時器0中斷允許
TH0 = 0xFC;
TL0 = 0x18;
//設定時每隔1ms中斷一次
TR0 = 1
; //開始計數
startrun:
P1_3 = 0;
P1_0 = 1;
delay();
P1_0 = 0;
P1_1 = 1;
delay();
P1_1 = 0;
P1_2 = 1;
delay();
P1_2 = 0;
P1_3 = 1;
delay();
goto
startrun;
}
//定時器0中斷處理
void
timeint(
void
)
interrupt
1
{
TH0=0xFC;
TL0=0x18;
//設定時每隔1ms中斷一次
count++;
}
void
delay()
{
endcount=2;
count=0;
do
{}
while
(count<endcount);
}
將上面的程序編譯,用ISP下載線下載至單片機運行,步進電機便轉動起來了,初步告捷!
不過,上面的程序還只是實現了步進電機的初步控制,速度和方向的控制還不夠靈活,另外,由于沒有利用步進電機內線圈之間的“中間狀態”,步進電機的步進角度為18度。 二手步進電機的要注意,有些退磁比較嚴重,這個店還是比較好的,加到12V,步進的力氣很大,用手擰不住!呵呵,算是幫這個店做個廣告了O(∩_∩)O~所以,我將程序代碼改進了一下,如下:
代碼二
#include
<AT89X51.h>
static unsigned int
count;
static int
step_index;
void
delay(
unsigned int
endcount);
void
gorun(
bit
turn,
unsigned int
speedlevel);
void
main(
void
)
{
count = 0;
step_index = 0;
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
EA = 1;
//允許CPU中斷
TMOD = 0x11;
//設定時器0和1為16位模式1
ET0 = 1;
//定時器0中斷允許
TH0 = 0xFE;
TL0 = 0x0C;
//設定時每隔0.5ms中斷一次
TR0 = 1;
//開始計數
do
{
gorun(1,60);
}
while
(1);
}
//定時器0中斷處理
void
timeint(
void
)
interrupt
1
{
TH0=0xFE;
TL0=0x0C;
//設定時每隔0.5ms中斷一次
count++;
}
void
delay(
unsigned int
endcount)
{
count=0;
do
{}
while
(count<endcount);
}
void
gorun(
bit
turn,
unsigned int
speedlevel)
{
switch
(step_index)
{
case
0:
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
break
;
case
1:
P1_0 = 1;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break
;
case
2:
P1_0 = 0;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break
;
case
3:
P1_0 = 0;
P1_1 = 1;
P1_2 = 1;
P1_3 = 0;
break
;
case
4:
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 0;
break
;
case
5:
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 1;
break
;
case
6:
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
break
;
case
7:
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
}
delay(speedlevel);
if
(turn==0)
{
step_index++;
if
(step_index>7)
step_index=0;
}
else
{
step_index--;
if
(step_index<0)
step_index=7;
}
}
改進的代碼能實現速度和方向的控制,而且,通過step_index靜態全局變量能“記住”步進電機的步進位置,下次調用 gorun()函數時則可直接從上次步進位置繼續轉動,從而實現精確步進;另外,由于利用了步進電機內線圈之間的“中間狀態”,步進角度減小了一半,只為9度,低速運轉也相對穩定一些了。
但是,在代碼二中,步進電機的運轉控制是在主函數中,如果程序還需執行其它任務,則有可能使步進電機的運轉收到影響,另外還有其它方面的不便,總之不是很完美的控制。所以我又將代碼再次改進:
代碼三
#include
<AT89X51.h>
static unsigned int
count;
//計數
static int
step_index;
//步進索引數,值為0-7
static bit
turn;
//步進電機轉動方向
static bit
stop_flag;
//步進電機停止標志
static int
speedlevel;
//步進電機轉速參數,數值越大速度越慢,最小值為1,速度最快
static int
spcount;
//步進電機轉速參數計數
void
delay(
unsigned int
endcount);
//延時函數,延時為endcount*0.5毫秒
void
gorun();
//步進電機控制步進函數
void
main(
void
)
{
count = 0;
step_index = 0;
spcount = 0;
stop_flag = 0;
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
EA = 1;
//允許CPU中斷
TMOD = 0x11;
//設定時器0和1為16位模式1
ET0 = 1;
//定時器0中斷允許
TH0 = 0xFE;
TL0 = 0x0C;
//設定時每隔0.5ms中斷一次
TR0 = 1
; //開始計數
turn = 0;
speedlevel = 2;
delay(10000);
speedlevel = 1;
do
{
speedlevel = 2;
delay(10000);
speedlevel = 1;
delay(10000);
stop_flag=1;
delay(10000);
stop_flag=0;
}
while
(1);
}
//定時器0中斷處理
void timeint(void) interrupt 1
{
TH0=0xFE;
TL0=0x0C;
//設定時每隔0.5ms中斷一次
count++;
spcount--;
if
(spcount<=0)
{
spcount = speedlevel;
gorun();
}
}
void
delay(
unsigned int
endcount)
{
count=0;
do
{}
while
(count<endcount);
}
void
gorun()
{
if
(stop_flag==1)
{
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
return
;
}
switch
(step_index)
{
case
0:
//0
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 0;
break
;
case
1:
//0、1
P1_0 = 1;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break
;
case
2:
//1
P1_0 = 0;
P1_1 = 1;
P1_2 = 0;
P1_3 = 0;
break
;
case
3:
//1、2
P1_0 = 0;
P1_1 = 1;
P1_2 = 1;
P1_3 = 0;
break
;
case
4:
//2
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 0;
break
;
case
5:
//2、3
P1_0 = 0;
P1_1 = 0;
P1_2 = 1;
P1_3 = 1;
break
;
case
6:
//3
P1_0 = 0;
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
break
;
case
7:
//3、0
P1_0 = 1;
P1_1 = 0;
P1_2 = 0;
P1_3 = 1;
}
if
(turn==0)
{
step_index++;
if
(step_index>7)
step_index=0;
}
else
{
step_index--;
if
(step_index<0)
step_index=7;
}
}
在代碼三中,我將步進電機的運轉控制放在時間中斷函數之中,這樣主函數就能很方便的加入其它任務的執行,而對步進電機的運轉不產生影響。在此代碼中,不但實現了步進電機的轉速和轉向的控制,另外還加了一個停止的功能,呵呵,這肯定是需要的。
步進電機從靜止到高速轉動需要一個加速的過程,否則電機很容易被“卡住”,代碼一、二實現加速不是很方便,而在代碼三中,加速則很容易了。在此代碼中,當轉速參數speedlevel 為2時,可以算出,此時步進電機的轉速為1500RPM,而當轉速參數speedlevel 1時,轉速為3000RPM。當步進電機停止,如果直接將speedlevel 設為1,此時步進電機將被“卡住”,而如果先把speedlevel 設為2,讓電機以1500RPM的轉速轉起來,幾秒種后,再把speedlevel 設為1,此時電機就能以3000RPM的轉速高速轉動,這就是“加速”的效果。
在此電路中,考慮到電流的緣故,我用的NPN三極管是S8050,它的電流最大可達1500mA,而在實際運轉中,我用萬用表測了一下,當轉速為1500RPM時,步進電機的電流只有90mA左右,電機發熱量較小,當轉速為60RPM時,步進電機的電流為200mA左右,電機發熱量較大,所以NPN三極管也可以選用9013,對于電機發熱量大的問題,可加一個10歐到20歐的限流電阻,不過這樣步進電機的功率將會變小。
由于在下淺薄,錯誤和問題難免,請各位不吝賜教!
作者:
就這呀
時間:
2015-12-26 09:47
樓主會用匯編語言嗎?
作者:
雪玉寐影
時間:
2015-12-27 14:57
步進電機的控制還是需要技巧的,跟直流電機完全不一樣
作者:
機械小瘋子
時間:
2016-3-6 08:20
樓主可以詳細解釋電機實物圖與線圖嗎
作者:
林噯莫
時間:
2016-6-29 15:05
好資料,51黑有你更精彩!!!
作者:
460864915
時間:
2016-6-30 18:13
圖片有點不清晰哎!
作者:
謝戈里
時間:
2017-12-1 11:31
51黑有你更精彩!
作者:
愛新覺羅司令
時間:
2017-12-1 12:50
很好,受教了,共同學習。
作者:
a25575703
時間:
2018-1-11 02:10
感謝樓主的分享。
作者:
技術求助
時間:
2018-1-14 07:50
好資料,51黑有你更精彩
作者:
chaoself
時間:
2018-1-26 23:26
好資料,51黑有你更精彩!!!
作者:
逐行掃描
時間:
2018-1-28 14:32
不錯的!謝謝!
作者:
endura82
時間:
2018-2-5 15:22
最近剛開始準備做點小東西,初步計劃先整合步進電機和超聲測距報警器,
1) 用步進電機控制小車前進,
2)距離障礙物一定距離時(如10cm)停下,
3)然后向反方向運動
4)距障礙物10cm再停下,再反方向
。。。。
所以,正在學習步進電機相關內容和程序。本貼對我有很大的幫助,非常感謝。
有個小問題,怎么有的教材里通過對P1的第四位賦值來實現角度的轉動呢?和該貼有什么不同嗎?
請大家不吝指教。謝謝啦~
作者:
阿發1231313
時間:
2018-5-16 14:18
受益匪淺
作者:
99312312
時間:
2018-6-17 19:06
很詳細 謝謝分享
作者:
swmxyc
時間:
2019-3-31 12:23
非常好。試了下
作者:
QQ572008555
時間:
2020-2-18 22:32
很不錯 還沒研究步進電機 不過看完之后 有了一些印象 方便以后
作者:
lindeijun1
時間:
2020-2-19 15:42
謝謝樓主分享!!!!
作者:
電子設計個頭
時間:
2020-3-15 16:28
樓主好樣的
歡迎光臨 (http://www.denmoz.com/bbs/)
Powered by Discuz! X3.1