標題: 51單片機智能車超聲波避障實驗 [打印本頁]
作者: LIT 時間: 2018-11-16 20:02
標題: 51單片機智能車超聲波避障實驗
51單片機平臺-------超聲波避障實驗
圖1-1 51單片機主控板
圖1-2 一體云臺超聲波模塊
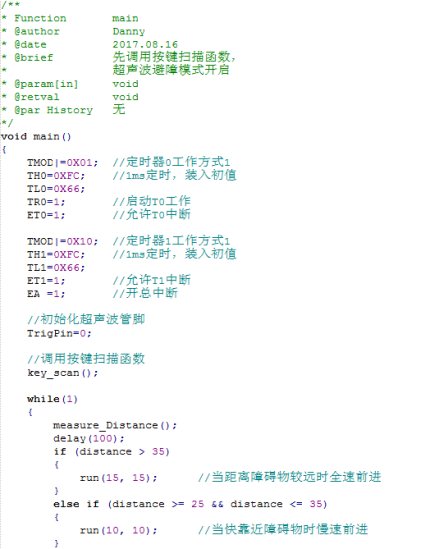
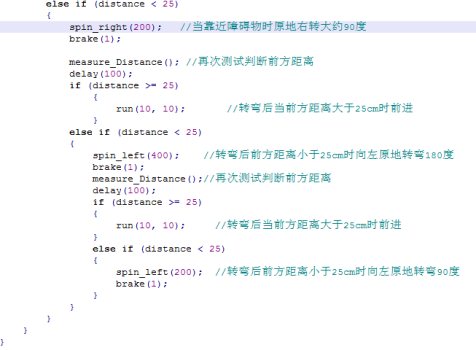
單片機上電之后,啟動超聲波避障功能,當前方有障礙物時小車則相應的轉向避障。
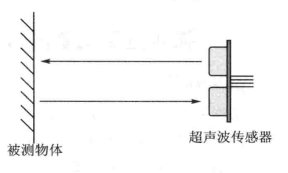
SR04是利用超聲波特性檢測距離的傳感器。其帶有兩個超聲波探頭,分別用作發射和接收超聲波。其測量的范圍是3-500cm。
圖3-1 超聲波發射和接收示意圖
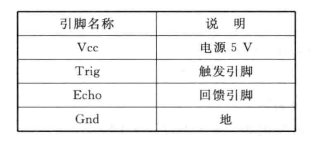
圖3-2 SR04超聲波模塊引腳
該模塊的工作原理:
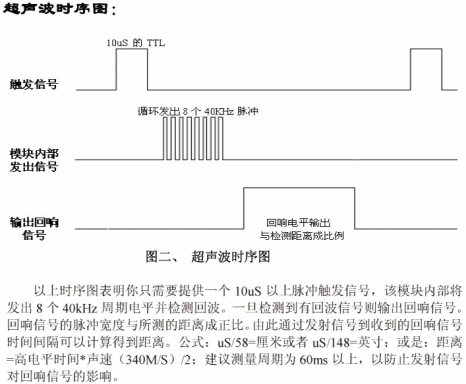
先使用單片機的P3.7引腳向TRIG腳輸入至少10us的高電平信號,觸發模塊的測距功能。如下圖3-3所示:
圖3-3 STM32發送觸發信號
測距功能觸發后,模塊將自動發出 8 個 40kHz 的超聲波脈沖,并自動檢測是否有信號返回,這一步由模塊內部自動完成。
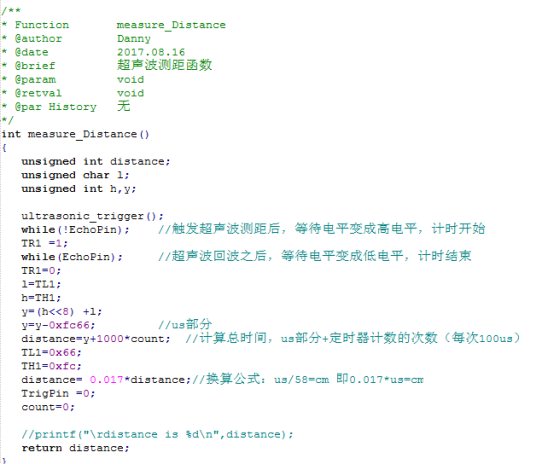
一旦檢測到有回波信號則ECHO引腳會輸出高電平。高電平持續的時間就是超聲波從發射到返回的時間。此時可以使用定時器獲取高電平的時間, 并計算出距被測物體的實際距離。公式: 距離=高電平時間*聲速(340M/S)/2。
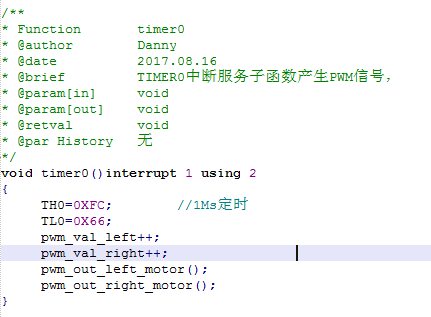
另外有關于PWM的原理以及定時器的理論知識請見實驗二以及實驗三。
4、實驗步驟
4-1.看懂原理圖
圖4-1 單片機主控板電路圖
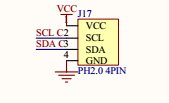
圖4-2 超聲波接線頭
4-2 理解原理圖
由電路原理圖可知超聲波的Trig引腳接在接在主控板上的RD(SCL_C)上,而Echo接在主控板上的WR(SDA_C)上。
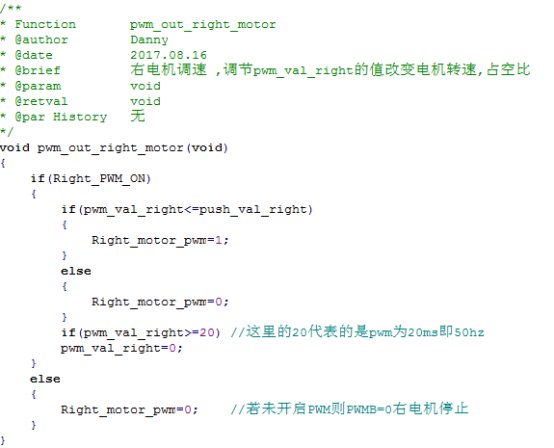
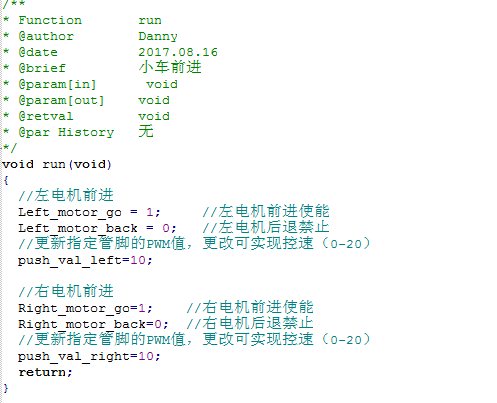
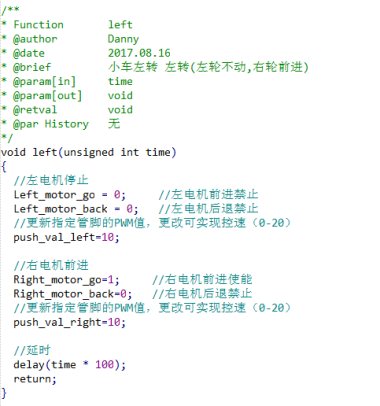
4-3.程序核心代碼如下:
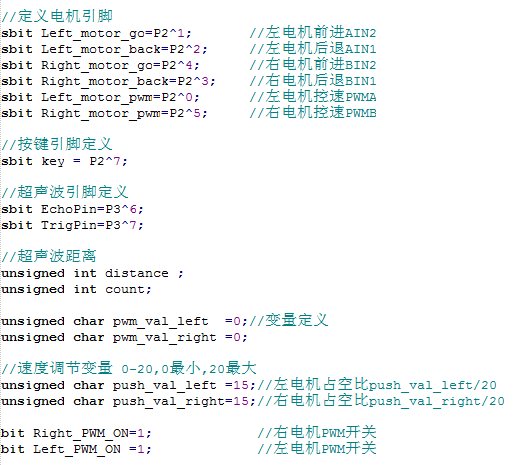
1.基本變量以及引腳的定義:
5.超聲波測距函數:
6.主函數
完整的Word格式文檔51黑下載地址:
 10.超聲波避障實驗.docx
(785.31 KB, 下載次數: 133)
10.超聲波避障實驗.docx
(785.31 KB, 下載次數: 133)
2018-11-16 20:01 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
作者: ptlantu 時間: 2018-11-17 09:17
學習學習
作者: 一寸灰 時間: 2019-4-25 14:02
程序似乎不對,另個地方都沒有定義,有點看不懂,求教?
作者: 一寸灰 時間: 2019-4-25 14:41
那個調用的ultrasonic_trigger();是什么?還有那個按鍵掃描是干啥的額
作者: 123lhz 時間: 2019-10-9 08:59
代碼少東西了
作者: leezll 時間: 2019-10-22 00:52
到底好不好啊!@好多都是不穩定得程序
作者: xybeyourself 時間: 2019-10-23 20:20
厲害了,這么多函數調用,很明了,待實驗驗證。
| 歡迎光臨 (http://www.denmoz.com/bbs/) |
Powered by Discuz! X3.1 |