1 �����S���҇�(gu��)�ć�(gu��)��(j��ng)��(j��)�c����ˮƽ�İl(f��)չ������(g��)�ИI(y��)��(du��)�Ԅ�(d��ng)��������Ҳ�������ӣ���p����Ⱦ����(ji��)�s�YԴ����Ƭ�C(j��)�Ŀ��Ƽ��g(sh��)�õ��ˏV���đ�(y��ng)�á��o(w��)Փ���ڹ��I(y��)���a(ch��n)�У�߀���������ИI(y��)��ˮ�����˂������в��ɻ�ȱ���YԴ���ֶ���(hu��)ʹ�õ�ˮ�䣬ˮ�����ˮλ���ƾ�������Ҫ�Ć�(w��n)�}�ˣ���ǰ����(hu��)�Ќ��T(m��n)���˿��ܣ������M(f��i)�������ֲ��ܜ�(zh��n)�_���Д�ˮλ�ߵ͡������Ԇ�Ƭ�C(j��)����ˮ���ˮλ�͵õ��ˏV����(y��ng)�á�
ˮλ����ϵ�y(t��ng)����ˮλ�鱻����(sh��)�Ŀ���ϵ�y(t��ng)�����ڹ��I(y��)���a(ch��n)�ĸ���(g��)�I(l��ng)���ЏV���đ�(y��ng)�á���Ŀǰ���^(gu��)�̿����I(l��ng)����ˮλ���Ƶ��о������ˏV�����P(gu��n)ע���S�������·Ҏ(gu��)ģ����څ���ͻ�����(f��)�s�������N��(f��)�s��Һλ����ϵ�y(t��ng)�ѳɞ�һ��(g��)�о����c(di��n)����Ƭ�C(j��)�ǿ������\(y��n)�еģ������ǿ����ĵģ�ͨ�^(gu��)��ͬ�ij���?q��)��F(xi��n)��ͬ�Ĺ��ܡ�����������Ī�(d��)�ص�һЩ���ܣ��@�DŽe��������Ҫ�M(f��i)�ܴ��������������ģ���Щ�t�ǻ�������Ҳ���y�����ġ���ʲôһ�c(di��n)Ҫ�Æ�Ƭ�C(j��)�أ�ԭ��ܺ�(ji��n)�Σ�ֻ��?y��n)��Ƭ�C(j��)ͨ�^(gu��)�Լ�����(xi��)�ij������Ԍ�(sh��)�F(xi��n)�����ܡ���Ч���Լ��߿ɿ��ԣ��F(xi��n)�����ϵ�y(t��ng)�Ļ���������Ƕ��ʽӋ(j��)��C(j��)ϵ�y(t��ng)����(ji��n)�QǶ��ʽϵ�y(t��ng)��������Ƭ�C(j��)������͡���V�������ռ���Ƕ��ʽϵ�y(t��ng)[1]��
Ŀǰ�҇�(gu��)�چ�Ƭ�C(j��)�y(c��)���b���о������a(ch��n)����(y��ng)���У�ȡ���˺ܴ�ijɿ�(j��)�����Y(ji��)�˺ܶཛ(j��ng)�(y��n)�����Ǹ��ИI(y��)��̎�ڰl(f��)չ�ڣ���(j��ng)�{(di��o)�飬��������о����@�����_(k��i)չ�Ĺ��������ص�����Փ���㷨����(sh��)���(l��i)�@������о���Փ���^�࣬���������a(ch��n)��(sh��)�H�ĺ��١�
һЩ�l(f��)�_(d��)��(gu��)���چ�Ƭ�C(j��)����ϵ�y(t��ng)�о�������͑�(y��ng)���ϣ��ѷe���˺ܶཛ(j��ng)�(y��n)���춨�˻��A(ch��)���M(j��n)���ˇ�(gu��)�H�Ј�(ch��ng)���҇�(gu��)�����͜y(c��)���b���cϵ�y(t��ng)�о������졢��(y��ng)�úͽ�(j��ng)�(y��n)�ϣ��c�����l(f��)�_(d��)��(gu��)�����߀���ڲ�࣬�����҇�(gu��)���о��ˆT�ѽ�(j��ng)�˷��ܶ����y�����ڲ����������ǰ�M(j��n)�����������P(gu��n)�I(l��ng)���s���������^(gu��)�l(f��)�_(d��)��(gu��)�ҵļ��g(sh��)ˮƽ���@�ǰl(f��)չڅ��(sh��)��
�ڹ��r(n��ng)�I(y��)���a(ch��n)�Լ��ճ����(y��ng)���У�������(hu��)��Ҫ��(du��)�����е�ˮλ�M(j��n)���Ԅ�(d��ng)���ơ������Ԅ�(d��ng)���Ʊ��䡢ˮ�ء�ˮ�ۡ�偠t�������е���ˮ���������г�ˮ�RͰ���Ԅ�(d��ng)�a(b��)ˮ���ơ��Ԅ�(d��ng)늟�ˮ������_(k��i)ˮ�C(j��)���Ԅ�(d��ng)�M(j��n)ˮ���Ƶȡ��mȻ���Nˮλ���Ƶļ��g(sh��)Ҫ��ͬ�����Ȳ�ͬ�����ǻ����Ŀ���ԭ�����Ԛw�{��һ��ķ������Ʒ�ʽ����������Ҫ�^(q��)�e���ڙz�y(c��)ˮλ�ķ�ʽ��������ʽ���Լ��������ϵą^(q��)�e��
�S����Ƭ�C(j��)���C(j��)���g(sh��)�IJ���l(f��)չ����PC�C(j��)�Ͷ��_(t��i)��Ƭ�C(j��)��(g��u)�ɵĶ��C(j��)��W(w��ng)�j(lu��)�l(f��)չ����Ƭ�C(j��)�Ԇ�(w��n)���ԁ�(l��i)�����ܲ������ߺ����ƣ��w�eС���ٶȿ졢���ʵ͵����c(di��n)ʹ���đ�(y��ng)���I(l��ng)������V����һ�㣬���I(y��)����ϵ�y(t��ng)�Ĺ����h(hu��n)����ɔ_�ԏ�(qi��ng)�����Æ�Ƭ�C(j��)���ƾ��ܿ˷��@Щȱ�c(di��n)����ˆ�Ƭ�C(j��)�ڿ����I(l��ng)��õ��V���đ�(y��ng)�ã�ʹ�Æ�Ƭ�C(j��)����Һ�w��ˮλ�ǂ�(g��)�ܺõ��x����51��Ƭ�C(j��)��Һλ����ϵ�y(t��ng)�ȝM��ϵ�y(t��ng)���ȵ�Ҫ��ͬ�r(sh��)���пɿ���[2]��
��Փ���(hu��)��(j��ng)��(j��)����w�٣�ˮ���˂���������������a(ch��n)��������Ҫ�����á�һ������ˮ���p�t��(g��)����(l��i)�O��ز��㣬�t������ɇ�(y��n)�ص����a(ch��n)�¹ʼ��p�����Ķ���(du��)��ˮϵ�y(t��ng)����˸��ߵ�Ҫ�M�㼰�r(sh��)����(zh��n)�_����ȫ����Ĺ�ˮ�������Ȼʹ���˹��ķ�ʽ���ڄ�(d��ng)��(qi��ng)�ȴ���Ч�ʵͣ���ȫ���y�Ա��ϣ���˱���M(j��n)���Ԅ�(d��ng)������ϵ�y(t��ng)�ĸ��졣�Ķ���(sh��)�F(xi��n)�ṩ����ˮ����ƽ��(w��n)��ˮ�����Ԅ�(d��ng)�������O(sh��)Ӌ(j��)�ͳɱ����ߌ�(sh��)�Ãr(ji��)ֵ�Ŀ�������
һ�㹤�Sʹ�õ�ˮ�䣬�w�e�����^�����Ԍ�(du��)ˮλ�Ŀ������������(y��ng)�Ĵ��ˣ������S�����I(y��)��ʹ�ñ��^�࣬��(du��)ˮλ�Ŀ��ƾ���Ҫ��Ҳ�ߡ������Ԅ�(d��ng)�����g(sh��)�ڵV��I(y��)�ďV����(y��ng)�ã�ˮλ�Ԅ�(d��ng)���Ƽ��g(sh��)Խ��(l��i)Խ�l�����M(j��n)�뵽�Ԅ�(d��ng)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ߵ�ҕ����
2 ϵ�y(t��ng)�O(sh��)Ӌ(j��)�������^�f(shu��)����(du��)��ˮλ�M(j��n)�п��Ƶķ�ʽ�кܶ࣬����(y��ng)���^�����Ҫ�ЃɷN��һ�N�Ǻ�(ji��n)�εęC(j��)еʽ�����b�ÿ��ƣ�һ�N�Ǐ�(f��)�s�Ŀ��������Ʒ�ʽ���ɷN��ʽ�Č�(sh��)�F(xi��n)���£�
- ��(ji��n)�εĽӾ�ʽ���Ʒ�ʽ���䳣����ʽ�и���(bi��o)ʽ��늘Oʽ�ȣ��@�N������ʽ�ă�(y��u)�c(di��n)�ǽY(ji��)��(g��u)��(ji��n)�Σ��ɱ����������چ�(w��n)�}�Ǿ��Ȳ��ߣ������M(j��n)�Д�(sh��)ֵ�@ʾ����������������`��(d��ng)������ֻ�܆Ϊ�(d��)���ƣ��cӋ(j��)��C(j��)�M(j��n)��ͨ���^�y��(sh��)�F(xi��n)
- ��(f��)�s���������Ʒ�ʽ���@�N���Ʒ�ʽ��ͨ�^(gu��)���b��ˮ�ó��ڹܵ��ϵĉ������������ѳ��ډ���׃�ɘ�(bi��o)��(zh��n)���I(y��)���̖(h��o)��ģ�M��̖(h��o)����(j��ng)�^(gu��)ǰ�÷Ŵ�·�ГQ��A/D׃�Q�ɔ�(sh��)����̖(h��o)���͵���Ƭ�C(j��)����(j��ng)��Ƭ�C(j��)�\(y��n)��ͽo�������ı��^���M(j��n)��PID�\(y��n)�㣬�ó��{(di��o)��(ji��)������(l��i)������ݔ��늉�׃�����M(j��n)���{(di��o)��(ji��)늙C(j��)�D(zhu��n)�٣����_(d��)������ˮ��ˮλ��Ŀ��[3]��
ᘌ�(du��)�����ɷN���Ʒ�ʽ���Լ��O(sh��)Ӌ(j��)���_(d��)��������Ҫ���@���x��ڶ��N���Ʒ�ʽ����K�γɵķ����ǣ����Æ�Ƭ�C(j��)����ƺ��ģ��O(sh��)Ӌ(j��)һ��(g��)��(du��)��ˮ��ˮλ�M(j��n)�бO(ji��n)�ص�ϵ�y(t��ng)������(j��)�O(ji��n)�،�(du��)���������Ҫ��(sh��)�r(sh��)�z�y(c��)ˮ���ˮλ�߶ȣ����c�_(k��i)ʼ�A(y��)�O(sh��)ֵ�M(j��n)�б��^���Ɇ�Ƭ�C(j��)���ƹ̑B(t��i)�^������_(k��i)���M(j��n)��ˮλ���{(di��o)������K�_(d��)��Һλ���c�O(sh��)��ֵ���z�y(c��)ֵ�����������O(sh��)��ֵ�r(sh��)��Ҫ���(b��o)�������_(k��i)�^���������ˮ��ֹͣ��ˮ���z�y(c��)ֵ�����������O(sh��)��ֵ��Ҫ���(b��o)�����_(k��i)���^���������ˮ���_(k��i)ʼ��ˮ���F(xi��n)��(ch��ng)��(sh��)�r(sh��)�@ʾ�y(c��)��ֵ���Ķ���(sh��)�F(xi��n)��(du��)ˮ��ˮλ�ıO(ji��n)�ء�
3 ˮλ����ϵ�y(t��ng)��ԭ�����O(sh��)Ӌ(j��)����
3.1 ˮλ����ϵ�y(t��ng)�M��ϵ�y(t��ng)���Æ�Ƭ�C(j��)���锵(sh��)�ֿ�������̎���������У��ɉ���׃�������́�(l��i)��늉���̖(h��o)��(j��ng)�^(gu��)A/D�D(zhu��n)�Q���ͽo��Ƭ�C(j��)��Ȼ���Ɇ�Ƭ�C(j��)����늄�(d��ng)��(zh��)�ЙC(j��)��(g��u)�����w�Y(ji��)��(g��u)��D3.1��ʾ��
��B(t��i)�O(sh��)��
�D3.1ˮλ����ԭ����D
3.2 ��Ƭ�C(j��)ϵ�y(t��ng)�M�ɼ�����ԭ����ϵ�y(t��ng)��Ҫ����ATMEL��˾���a(ch��n)�Ć�Ƭ�C(j��)AT89C51оƬ����ģ�����һЩ�ⲿԭ������(g��u)����Ӳ���·��AT89C51��һ�N��4K�ֹ�(ji��)FLASH�ɾ��̿ɲ���ֻ�x�惦(ch��)���ĵ�늉���������CMOS 8λ̎�������c��(bi��o)��(zh��n)��MCS-51ָ���ݔ���ܽ�����ݡ����ڌ����8λCPU��FLASH�惦(ch��)���M���چ�(g��)оƬ�У�����AT89C51��һ�N��Ч��������[4]��
3.2.1 ϵ�y(t��ng)�M����ϵ�y(t��ng)��Ҫ��AT89C51��Ƭ�C(j��)��LED�@ʾ�·����(b��o)���·�����T(m��n)���·�Լ�늙C(j��)�����·�Ȳ��ֽM�ɡ�ϵ�y(t��ng)��D��D3.2��ʾ��
�D3.2 ϵ�y(t��ng)�M�ɿ�D
3.2.2 ����ԭ��ˮλ����ϵ�y(t��ng)�Ļ���ԭ���ǣ����چ�Ƭ�C(j��)AT989C51��(sh��)�F(xi��n)��ˮλ�����������I�P(p��n)����(sh��)�a�@ʾ��A/D�D(zhu��n)�Q�����������Դ�Ϳ��Ʋ��ֵȽM�ɡ������^(gu��)�����£���(d��ng)ˮλ�l(f��)��׃���r(sh��)�������B����ˮ��ײ���ܛ�ܹ܃�(n��i)��ˮ���l(f��)��׃����ˮ���������ڽ��յ�ܛ�܃�(n��i)��ˮ�≺��̖(h��o)����׃�����D(zhu��n)����늉���̖(h��o)��ԓ��̖(h��o)��(j��ng)�^(gu��)�Ŵ��\(y��n)��Ŵ��·�Ŵ��׃�ɷ��Ȟ�0-5V�Ę�(bi��o)��(zh��n)��̖(h��o)������A/D�D(zhu��n)�Q����A/D�D(zhu��n)�Q����ģ�M��̖(h��o)׃�ɔ�(sh��)����̖(h��o)�����Ɇ�Ƭ�C(j��)�M(j��n)�Ќ�(sh��)�r(sh��)��(sh��)��(j��)�ɼ������M(j��n)��̎��������(j��)�O(sh��)��Ҫ�����ݔ����ͬ�r(sh��)��(sh��)�a���@ʾҺλ�߶ȡ�ͨ�^(gu��)�I�P(p��n)�O(sh��)��Һλ�ߡ��ͺ���ֵ�Լ���(qi��ng)�ƈ�(b��o)������ԓϵ�y(t��ng)�Ŀ������c(di��n)��ֱ�^���@ʾˮλ�߶ȣ����������ˮλ�߶�[5]��
3.3 ���Ʒ������O(sh��)Ӌ(j��)3.3.1 �O(sh��)Ӌ(j��)˼·�Æ�Ƭ�C(j��)��ˮ��ˮλ�����@��(g��)�O(sh��)Ӌ(j��)����Ҳ�ǂ�����������̖(h��o)�͵���Ƭ�C(j��)����Ƭ�C(j��)�ٌ���̖(h��o)ݔ���o늙C(j��)����(l��i)����O(sh��)Ӌ(j��)��Ҫ�������Д��Ƿ�Ҫ����(d��ng)����ֹͣ늙C(j��)���\(y��n)�D(zhu��n)���_(d��)��ˮλ�Ŀ��ƣ�ͬ�r(sh��)�(q��)��(d��ng)�@ʾ�·�@ʾ��(d��ng)ǰˮλ����̎�Ġ�B(t��i)�����ȣ��·�@ȡ��̖(h��o)��Ȼ���Ɇ�Ƭ�C(j��)AT89C51��(du��)�y(c��)��ˮλ��̖(h��o)�M(j��n)���Д࣬����(j��)�Д�ĽY(ji��)������Ƭ�C(j��)ݔ������(y��ng)�Ŀ�����̖(h��o)�����^����Ą�(d��ng)�����M(j��n)������늙C(j��)�Ć���(d��ng)����ֹͣ����(d��ng)ˮ���ˮλ�½����_(d��)�����ޕr(sh��)���膢��(d��ng)늙C(j��)�oˮ�乩ˮ����(d��ng)ˮ���ˮλ�_(d��)������(y��ng)ԓ�P(gu��n)�]늙C(j��)�������ò�ͬɫ�ʵİl(f��)����O���@ʾ����(y��ng)��ˮλ����(d��ng)ϵ�y(t��ng)���F(xi��n)���ϕr(sh��)����(b��o)���·����[6]��
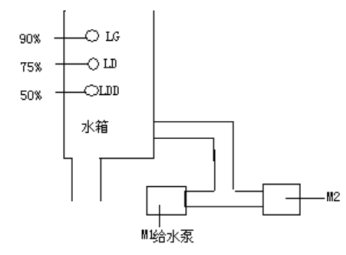
3.3.2 �����O(sh��)Ӌ(j��)��(d��ng)ˮ��ˮλ�͕r(sh��)������(d��ng)M1��M2���o�oˮ��ˮλ������90%��ֹͣM1����(d��ng)ˮ��ˮλ�ͣ�С��50%���r(sh��)��ͬ�r(sh��)����(d��ng)M1��M2����(d��ng)ˮλ������50%����70%һ�r(sh��)��M2ֹͣ�\(y��n)�У�M1�^�m(x��)�\(y��n)�е�ˮλ������90%���ϲ�ֹͣ������
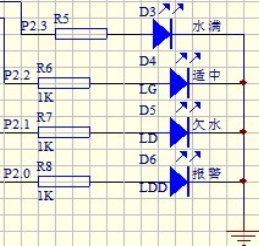
���D3.3�У�M1��M2��oˮ�ÙC(j��)�M��LG��LD��LDD�քe��ˮλ�ߡ�ˮλ�͡�ˮλ�͵����_(k��i)�P(gu��n)����(d��ng)ˮλ�ߣ�����90%���r(sh��)��LG�]�ϣ���(d��ng)ˮλ�ͣ�С��75%���r(sh��)��LD�]�ϣ���(d��ng)ˮλ�͵ͣ�С��50%���r(sh��)��LDD�]��[7]��
�D3.3 ���Ʒ�����D
3.3.3 ��(b��o)�������^(gu��)��
��(d��ng)ˮλ����90�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)׃�����l(f��)����̖(h��o)��LG�]�ϣ�ϵ�y(t��ng)ˮλ�߈�(b��o)������(d��ng)ˮλ����75�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)׃�����l(f��)����̖(h��o)��LD�]�ϣ�ϵ�y(t��ng)ˮλ�͈�(b��o)������(d��ng)ˮλ���c50�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)��׃�����l(f��)����̖(h��o)��LDD�]�ϣ�ϵ�y(t��ng)ˮλ�͵͈�(b��o)�����ք�(d��ng)/�Ԅ�(d��ng)ģʽ�D(zhu��n)�Q�������£�ȫ�Ԅ�(d��ng)ģʽ�£�ϵ�y(t��ng)�Ԅ�(d��ng)�Д�ˮλ�Ġ�r���x��ͬ������B(t��i)�����ք�(d��ng)��ģʽ�£����_(t��i)�oˮ�õ��\(y��n)�п��ƿ����˹��Լ�����[7]��
�˷����O(sh��)Ӌ(j��)���õ���AT89C51оƬ��AY89C51�Ǹ�����COMS8λ��Ƭ�C(j��)��Ƭ��(n��i)��4K bytes�Ŀɷ���(f��)����(xi��)��ֻ�x�惦(ch��)����PEROM����128 bytes���S�C(j��)��ȡ�惦(ch��)����RAM������������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦(ch��)���g(sh��)���a(ch��n)�����ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��Ƭ��(n��i)��ͨ��8λ����̎������CPU����Flash�惦(ch��)��Ԫ��
4 Ӳ���O(sh��)Ӌ(j��)ˮλ��������Ӳ����Ҫ�����Ɇ�Ƭ�C(j��)������������׃���������I�P(p��n)�·����(sh��)�a�@ʾ�����A/D�D(zhu��n)�Q����ݔ�������·�ȡ�
4.1 ��Ƭ�C(j��)��Ƭ�C(j��)������ATMEL��˾���a(ch��n)���p��40�_AT89C51оƬ��оƬ���_���D4.1��ʾ�����У�P0������A/D�D(zhu��n)�Q���@ʾ��P1���B��һ��(g��)4*4���I�P(p��n)��P2�����ڿ���늴��y��ˮ�Ä�(d��ng)����P3�������ϡ�����ָʾ������(b��o)��ָʾ���Լ������x��(xi��)���ƺ��Д��[8]��
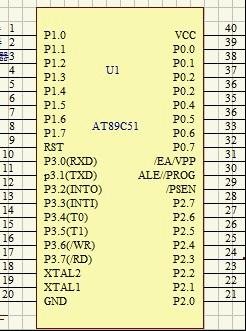 �D4.1 AT89C51���_�D
�D4.1 AT89C51���_�D1����Ƭ�C(j��)�Ĺ����^(gu��)��
��Ƭ�C(j��)�Ԅ�(d��ng)����x�������΄�(w��)���^(gu��)�̣�Ҳ���dž�Ƭ�C(j��)��(zh��)�г�����^(gu��)�̣���һ�l�l��(zh��)�е�ָ����^(gu��)�̣����^ָ����ǰ�Ҫ���Ƭ�C(j��)��(zh��)�еĸ��N�������õ��������ʽ��(xi��)��(l��i)���@�����O(sh��)Ӌ(j��)�ˆT�x������ָ��ϵ�y(t��ng)���Q���ģ�һ�lָ�(du��)��(y��ng)��һ�N������������Ƭ�C(j��)���܈�(zh��)�еĵ�ȫ���΄�(w��)����횰�Ҫ��Q�Ć�(w��n)�}����һϵ�е�ָ��@Щָ�������x����Ƭ�C(j��)���R(sh��)�e�͈�(zh��)�е�ָ����@һϵ��ָ��ļ��Ͼͳɞ��������Ҫ�A(y��)�ȴ���ھ��д惦(ch��)���ܵIJ��������惦(ch��)���С��惦(ch��)�����S��惦(ch��)��Ԫ����С�Ĵ惦(ch��)��Ԫ���M�ɣ������Ƿ����S��g�M��һ�ӣ�ָ��ʹ�����@Щ��Ԫ���Ԫ���ָ��ȡ������(zh��)�о����Ƿ���ÿ��(g��)���g�ı��ַ��䵽��Ψһһ��(g��)���g̖(h��o)һ�ӣ�ÿһ��(g��)�惦(ch��)��ԪҲ��횱����䵽Ψһ�ĵ�ַ̖(h��o)��ԓ��ַ̖(h��o)�ɞ�惦(ch��)��Ԫ�ĵ�ַ���@��ֻҪ֪���˴惦(ch��)��Ԫ�ĵ�ַ���Ϳ����ҵ��@��(g��)�惦(ch��)��Ԫ�����д惦(ch��)��ָ��Ϳ��Ա�ȡ����Ȼ���ٱ���(zh��)�С�
����ͨ��������(zh��)�еģ����Գ����е�ָ��Ҳ��һ�l�l����ŵģ���Ƭ�C(j��)�ڈ�(zh��)�г���r(sh��)Ҫ���@Щָ��һ�l�lȡ�������Ԉ�(zh��)�У������һ��(g��)������ָۙ�����ڵĵ�ַ���@һ�������dz���Ӌ(j��)��(sh��)��PC��������CPU�У������_(k��i)ʼ��(zh��)�г���r(sh��)���oPC�x�Գ����е�һ�lָ�����ڵĵ�ַ��Ȼ��ȡ��ÿһ�lҪ��(zh��)�е����PC���еă�(n��i)�ݾ͕�(hu��)�Ԅ�(d��ng)���ӣ��������ɱ��lָ���L(zh��ng)�țQ����������1��2��3����ָ����һ�lָ�����ʼ��ַ�����Cָ������(zh��)�С�
4.2 �r(sh��)��·MCS-51��Ƭ�C(j��)��(n��i)������ʎ�·��һ��(g��)�����淴��Ŵ���������XTAL1��XTAL2�քe�ǷŴ�����ݔ��˺�ݔ���ˡ���Ƭ�C(j��)��(n��i)���mȻ����ʎ�·����Ҫ�γɕr(sh��)犣��ⲿ߀�踽���·��MCS-51��Ƭ�C(j��)�ĕr(sh��)犮a(ch��n)����ʽ�ЃɷN��
�������(n��i)������ʎ�·��XTAL1��XTAL2��������Ӷ��r(sh��)Ԫ������(n��i)����ʎ�·��a(ch��n)���Լ���ʎ����ʾ���������^�쵽XTAL2ݔ���ĕr(sh��)���̖(h��o)����õ�����XTAL1��XTAL2֮�g�B�Ӿ��w��ʎ���c��ݘ�(g��u)�ɷ�(w��n)�����Լ���ʎ������D4.2��ʾ��
���w����1.2-12MHz֮�g�x��MCS-51��Ƭ�C(j��)��ͨ����(y��ng)����r�£�ʹ����ʎ�l�ʞ�6MHz��ʯӢ���w����12MHz�l�ʵľ��w��Ҫ���ڸ��ٴ���ͨ����r�²�ʹ�ã���(du��)���ֵ�](m��i)�Ї�(y��n)���Ҫ������ȡֵ��(du��)��ʎ�l��ݔ���ķ�(w��n)���ԡ���С����ʎ�·�����ٶ������SӰ푡�C1��C2����20-100pF֮�gȡֵ��һ��ȥ30pF���ҡ�
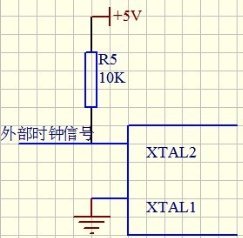
���O(sh��)Ӌ(j��)�Ć�Ƭ�C(j��)ϵ�y(t��ng)�У����˸���Ƭ�C(j��)֮�g�r(sh��)���̖(h��o)��ͬ������(y��ng)��(d��ng)����Ψһ�ĺ����ⲿ��ʎ�}�_������Ԇ�Ƭ�C(j��)�ĕr(sh��)犡��ⲿ�r(sh��)犷�ʽ���ǰ��ⲿ��ʎ��̖(h��o)ֱ�ӽ���XTAL1��XTAL2������HMOS��CHMOS��Ƭ�C(j��)�ⲿ�r(sh��)��M(j��n)���������ͬ�����ⲿ��ʎ��̖(h��o)Դ����ķ�ʽҲ��ͬ��HMOS�͆�Ƭ�C(j��)��XTAL2�M(j��n)�룬�ⲿ��ʎ��̖(h��o)����XTAL2������(n��i)������Ŵ�����ݔ���XTAL1��(y��ng)�ӵأ���D4.3��ʾ������XTAL2�˵�߉�ƽ����TTL�ģ���߀Ҫ��һ������衣CHMOS�͆�Ƭ�C(j��)��XTAL1�M(j��n)�룬�ⲿ��ʎ��̖(h��o)����XTAL2�ɲ��ӵأ���D4.4��ʾ��
 �D4.2 ʹ��Ƭ��(n��i)��ʎ�·�ĕr(sh��)��·
�D4.2 ʹ��Ƭ��(n��i)��ʎ�·�ĕr(sh��)��· �D4.3 HMOS�͆�Ƭ�C(j��)���ⲿ�r(sh��)��·
�D4.3 HMOS�͆�Ƭ�C(j��)���ⲿ�r(sh��)��·�D4.4 CHMOS�͆�Ƭ�C(j��)���ⲿ�r(sh��)��·
4.3 �Դ�·��ˮλ����ϵ�y(t��ng)�У�����Ԫ��ϵ�y(t��ng)�ṩ+5V�Ĺ����Դ����220V�Ľ����ͨ�^(gu��)׃�����D(zhu��n)�Q��15V늉���Ȼ��(j��ng)�^(gu��)�����V����õ�+5V��ϵ�y(t��ng)�����Դ����D4.5��ʾ��
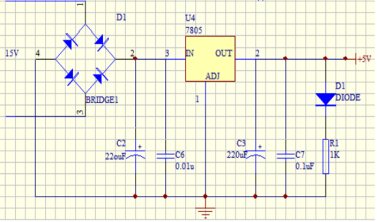 �D4.5 ��Ƭ�C(j��)���Դ�·
�D4.5 ��Ƭ�C(j��)���Դ�·��������(l��i)�ԡ����X(ju��)��һ�~���˂���ҕ�X(ju��)�� (t��ng)�X(ju��)�����X(ju��)���|�X(ju��)�����ٸ����������P(gu��n)��Ϣ�������w�Ĵ�С���Π���ɫ�����X(ju��)����������ζ�ȡ���ҕ�X(ju��)��r�£��^���ǿ��۾������M(j��n)�и��X(ju��)�����Ǐ��۾��M(j��n)������̼���̖(h��o)ͨ�^(gu��)��(j��ng)���͵����X���ɴ��X��֪���w�Ĵ�С���ɫ��Ȼ���ɴ��X�ṩ������̖(h��o)֧���Є�(d��ng)�� (t��ng)�X(ju��)�����X(ju��)Ҳ��ȫһ�ӡ�Ȼ��Ҫ�Ǵ��X�ܵ��@Щ�̼������ȱ���н������̼��ġ���١��˵ġ���١����ԷQ֮��������������Ļ������������Ƚ������Ĵ̼���̖(h��o)Ȼ��a(ch��n)�������ڸ��N��(j��ng)������̖(h��o)������������ق��ʹ��X��
��������һ�N�ܸ��ܱ��y(c��)���w�������������D(zhu��n)������ڂ�ݔ��̎�������̖(h��o)���b�ã��ڬF(xi��n)���Ƽ��I(l��ng)���У��������õ��ˏV����(y��ng)�ã����N��Ϣ�IJɼ��x���˸��N���������������Ļ������������ܸ������ĸ��N���̼���������Ѹ�ٷ�ӳ�����O(sh��)Ӌ(j��)��(d��ng)���҂����õ�ˮλ̽�y(c��)��������
������ʹ��SY-9411L-D��׃����������(n��i)������1��(g��)����������������(y��ng)�ķŴ��·������������������(gu��)SM��˾���a(ch��n)��555-2��OEM����ʽ����������������ȫ�ض��a(b��)������(bi��o)����0-70�ȣ�����������(j��ng)�^(gu��)����ӹ�̎�����È�(ji��n)�̵��ߜ������⚤���b�������_�ֲ���D6.1��ʾ��1�_����̖(h��o)ݔ����-����2�_����̖(h��o)ݔ����-����3�_�鼤��(l��)늉���4�_��أ�5�_����̖(h��o)ݔ����+����6�_����̖(h��o)ݔ����+��[9]��
��ˮ��ײ����b1��ֱ����5mm��ܛ�ܣ�һ�˰��b��ˮ��ײ�����һ���c�������B�ӡ�ˮ��ˮλ�߶Ȱl(f��)��׃���r(sh��)������ܛ�܃�(n��i)ˮ��׃����Ȼ���������ˮ���D(zhu��n)�Q��늉���̖(h��o)��ݔ�͵�A/D�D(zhu��n)������
4.5 ����ͨ����Ƭ�C(j��)Ҫ��PC�B��Ҫ�õ�����ͨ�ţ���4.7��4.8��ʾ��D��D��ϵ�y(t��ng)ԭ��D[10]��
�D4.7 ��Ƭ�C(j��)��PC�B�ӿ�D
 �D4.8 ����ͨ��ԭ��D
�D4.8 ����ͨ��ԭ��DP1�������I�P(p��n)�·���B��һ��(g��)4*4�I�P(p��n)���Y(ji��)��(g��u)��D4.9��ʾ��
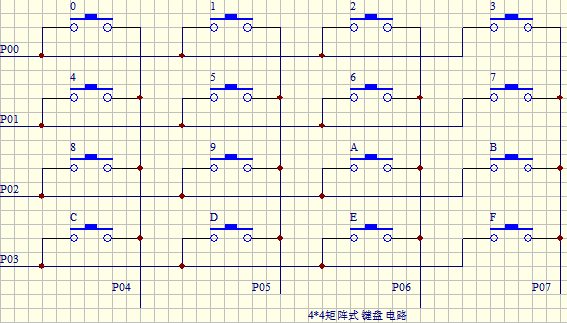
�D4.9 �I�P(p��n)�·
4.7 ˮλ�@ʾ�·�@ʾ�·��D4.10��ʾ��
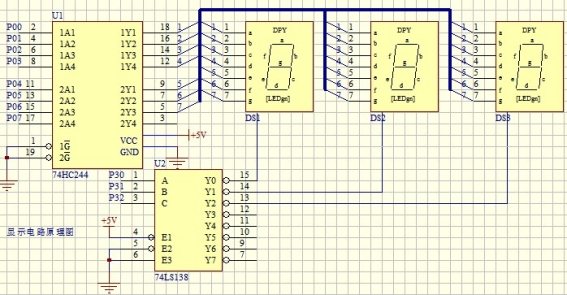 �D4.10�@ʾ�·
�D4.10�@ʾ�·
Һλ�@ʾ���Ô�(sh��)�a�܄�(d��ng)�B(t��i)�@ʾ��������0-999(��λ���Զ�)���x��Ĕ�(sh��)�a����7�ι�ꎘO�B�ӣ���̖(h��o)��LDS18B20�����@��ʹ�õ���74HC244������һ��(g��)8λ��D�|�l(f��)�����چ�Ƭ�C(j��)ϵ�y(t��ng)�н�(j��ng)��ʹ�ã����������ַ��(sh��)��(j��)�����U(ku��)չ���i������Ҳ����������ͨ��LED���(q��)��(d��ng)���������چΪ�(d��)ʹ��HEF4511B�߶��g�a�(q��)��(d��ng)�@ʾ����(l��i)��ɔ�(sh��)�a�ܵ��(q��)��(d��ng)�@ʾ���D4.10���@ʾ�·��ԭ��D[11]��
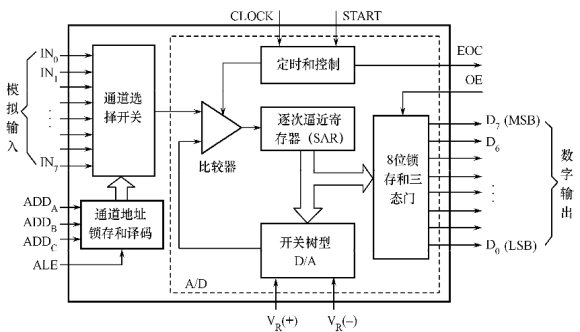
4.8 A/D�D(zhu��n)�Q�·4.8.1 ADC0809�ă�(n��i)��߉�Y(ji��)��(g��u)A/D�D(zhu��n)���·�ڿ�������������(d��o)���ã�������������ݔ����ģ�M늉���̖(h��o)�D(zhu��n)�Q���Ƭ�C(j��)��̎���Ĕ�(sh��)������ԓ����������CMOS��ˇ������ƽ�ʽ8λA/D�D(zhu��n)�Q��оƬADC0809����ʹ�Õr(sh��)���x���Дࡢ��ԃ���ӕr(sh��)�ȴ�3�N��������A/D�D(zhu��n)�Q�����ڽӾ��r(sh��)�Ƚ�(j��ng)�^(gu��)�\(y��n)��Ŵ����ͷ։��·�т�����ݔ���������̖(h��o)�D(zhu��n)�Q��늉���̖(h��o)��Ȼ��ݔ�뵽A/D�D(zhu��n)�Q����
ADC0809����һ��(g��)8·ģ�M�_(k��i)�P(gu��n)��һ��(g��)��ַ�i���c�g�a����һ��(g��)A/D�D(zhu��n)�Q����һ��(g��)���B(t��i)ݔ���i�����M�ɡ���·�_(k��i)�P(gu��n)���xͨ8��(g��)ģ�Mͨ�������S8·ģ�M���֕r(sh��)ݔ�룬����A/D�D(zhu��n)�Q���M(j��n)���D(zhu��n)�Q�����B(t��i)ݔ���i���������i��A/D�D(zhu��n)�Q��Ĕ�(sh��)��������(d��ng)OE�˞���ƽ�r(sh��)���ſ��ԏ����B(t��i)ݔ���i����ȡ���D(zhu��n)����Ĕ�(sh��)��(j��)��
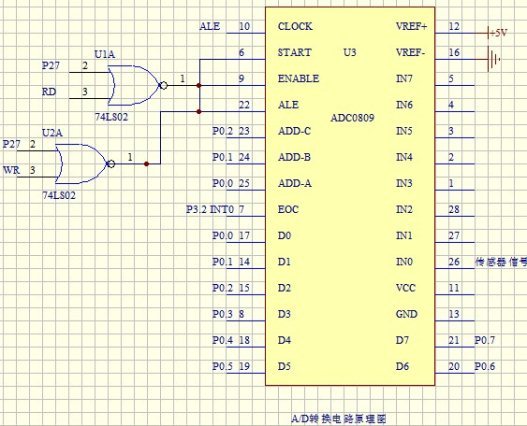
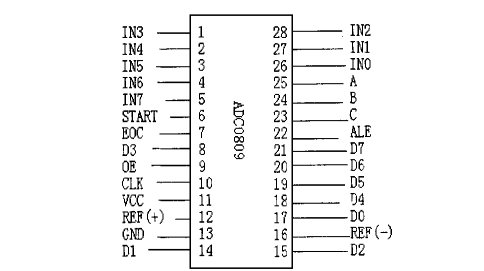
4.8.2 ADC0809�����_�DADC0809�����_�D��D4.12��ʾ��
ADC0809оƬ��28���_���p��ֱ��ʽ���b��
��(du��)ADC0809��Ҫ��̖(h��o)���_�Ĺ����f(shu��)�����£�
IN7-IN0����ģ�M��ݔ��ͨ��
ALE������ַ�i�����S��̖(h��o)����(du��)��(y��ng)ALE�����أ�A��B��C��ַ��B(t��i)�����ַ�i������
START�����D(zhu��n)�Q����(d��ng)��̖(h��o)��START�����ؕr(sh��)����(f��)λADC0809��START�½��ؕr(sh��)����(d��ng)оƬ���_(k��i)ʼ�M(j��n)��A/D�D(zhu��n)�Q����A/D�D(zhu��n)�Q���g��START��(y��ng)���ֵ��ƽ������̖(h��o)�Еr(sh��)��(ji��n)��(xi��)��ST[12]��
�D4.12 ADC0809���_�D
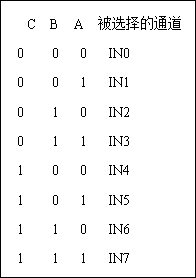
- B��C������ַ����ͨ���˿��x��A��͵�ַ��C��ߵ�ַ�����_�D�О�ADDA��ADDB��ADDC�����ַ��B(t��i)�cͨ����(du��)��(y��ng)�P(gu��n)ϵ��Ҋ(ji��n)4-1��
CLK�����r(sh��)���̖(h��o)��ADC0809�ă�(n��i)���](m��i)�Еr(sh��)��·������r(sh��)���̖(h��o)������ṩ������Еr(sh��)���̖(h��o) ���_��ͨ��ʹ���l�ʞ�500KHZ�ĕr(sh��)���̖(h��o)��
EOC�����D(zhu��n)�Q�Y(ji��)����̖(h��o)��EOC=0�������M(j��n)���D(zhu��n)�Q��EOC=1���D(zhu��n)�Q�Y(ji��)����ʹ����ԓ��B(t��i)��̖(h��o)���������ԃ�Ġ�B(t��i)��(bi��o)־���ֿ������Д�Ո(q��ng)����̖(h��o)ʹ�á�
D7-D0������(sh��)��(j��)ݔ�����������B(t��i)���_ݔ����ʽ�����Ժ͆�Ƭ�C(j��)�Ĕ�(sh��)��(j��)��ֱ�����B��D0�����λ��D7�����
OE����ݔ�����S��̖(h��o)�����ڿ������B(t��i)ݔ���i�������Ƭ�C(j��)ݔ���D(zhu��n)�Q�õ��Ĕ�(sh��)��(j��)��OE=0��ݔ����(sh��)��(j��)���ʸ��裻OE=1��ݔ���D(zhu��n)�Q�õ��Ĕ�(sh��)��(j��)��
Vcc��+5V�Դ��
Vref���������Դ����늉��Á�(l��i)�cݔ���ģ�M��̖(h��o)�M(j��n)�б��^��������αƽ��Ļ���(zh��n)�������ֵ��+5V��Vref+=+5V, Verf-=-5V��
A/D�D(zhu��n)�Q������Ҫ���g(sh��)ָ��(bi��o)�քe�ǣ��ֱ��ʺ��D(zhu��n)�Q���ʡ�
�ֱ��ʱ�ʾݔ����(sh��)����׃��һ��(g��)������(sh��)�a����ݔ��ģ�M늉���׃������
ADC���D(zhu��n)�Q���ʾ����܉��؏�(f��)�M(j��n)�Д�(sh��)��(j��)�D(zhu��n)�Q���ٶȣ�����ÿ���D(zhu��n)�Q�ĴΔ�(sh��)�������һ��A/D�D(zhu��n)�Q����Ҫ�ĕr(sh��)�g��������(w��n)���r(sh��)�g���������D(zhu��n)�Q���ʵĵ���(sh��)��
ADC0809�ă�(n��i)��߉�Y(ji��)��(g��u)�D��4.13��ʾ��
��4-1��ͨ���x�����
��4-1ͨ���x���
�D4.13 ADC0809�ă�(n��i)��߉�Y(ji��)��(g��u)�D
4.8.3 A/D�D(zhu��n)�Q�·ԭ��D�������O(sh��)Ӌ(j��)�^(gu��)�����A(y��)���˴��пڣ����M(j��n)һ���_(k��i)�l(f��)ʹ�á�A/D�D(zhu��n)�Q��õ��Ĕ�(sh��)��(j��)��(y��ng)���r(sh��)���ͽo��Ƭ�C(j��)�M(j��n)��̎������(sh��)��(j��)���͵��P(gu��n)�I��(w��n)�}����δ_�J(r��n)A/D�D(zhu��n)�Q����ɣ���?y��n)�ֻ�д_�J(r��n)��ɺ����M(j��n)�Ђ��͡�
A/D�D(zhu��n)�Q�·ԭ����D4.14��ʾ��
 �D4.14 A/D�D(zhu��n)�Q�·ԭ��D
�D4.14 A/D�D(zhu��n)�Q�·ԭ��D�_��A/D�D(zhu��n)�Q�Ƿ���ɣ�ͨ�������������N��ʽ��
��(du��)��һ�NA/D�D(zhu��n)�Q����(l��i)�f(shu��)���D(zhu��n)�Q�r(sh��)�g����һ�(xi��ng)���g(sh��)ָ��(bi��o)����֪�ĺ̶��ġ�����ADC0809�D(zhu��n)�Q�r(sh��)�g��128uS���ஔ(d��ng)��6MHz��MCS-51��Ƭ�C(j��)��64��(g��)�C(j��)�����ڡ��ɓ�(j��)���O(sh��)Ӌ(j��)һ��(g��)�ӕr(sh��)�ӳ���A/D�D(zhu��n)�Q����(d��ng)���{(di��o)�ô��ӳ������t�r(sh��)�gһ�����D(zhu��n)�Q�϶��ѽ�(j��ng)����ˣ������Ϳ��M(j��n)�Д�(sh��)��(j��)���͡�
A/D�D(zhu��n)�QоƬ�ɱ����D(zhu��n)�Q��ɵĠ�B(t��i)��̖(h��o)������ADC0809��EOC�ˡ���˿����ò�ԃ��ʽ���y(c��)ԇEOC�Ġ�B(t��i)�����ɴ_���D(zhu��n)�Q�Ƿ���ɣ��������M(j��n)�Д�(sh��)��(j��)���͡�
�ѱ����D(zhu��n)�Q��ɵĠ�B(t��i)��̖(h��o)��EOC�������Д�Ո(q��ng)����̖(h��o)�����Дʽ�M(j��n)�Д�(sh��)��(j��)���͡�
���ܲ��������ķN��ʽ��ֻҪһ���_�����D(zhu��n)�Q��ɣ�����ͨ�^(gu��)ָ���M(j��n)�Д�(sh��)��(j��)���͡������ͳ��ڵ�ַ����RD��̖(h��o)�r(sh��)��Ч��OE��̖(h��o)����Ч�����D(zhu��n)�Q��(sh��)��(j��)���ϔ�(sh��)��(j��)����������Ƭ�C(j��)����[13]��
4.9 늙C(j��)����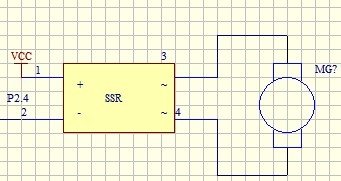
�O(sh��)Ӌ(j��)���ý����^(gu��)���̑B(t��i)�^����������^(gu��)��r(sh��)�_(k��i)����ؓ(f��)�d����^(gu��)��r(sh��)�P(gu��n)������ԡ���������ͨ���P(gu��n)���r(sh��)�g�ǰ낀(g��)�Դ���ڣ���ؓ(f��)�d�Ͽɵõ�һ��(g��)���������Ҳ��Ρ�������(y��ng)�p���ˌ�(du��)ؓ(f��)�d�ě_������������(y��ng)�Ŀ��ƻ�·�Юa(ch��n)�������l�ɔ_Ҳ���p�١���(d��ng)���ƶ�ݔ����ƽ�r(sh��)��SSR��(d��o)ͨ������늄�(d��ng)�C(j��)�_(k��i)ʼ������ˮ����(d��ng)���ƶ�ݔ����ƽ�r(sh��)��SSR��ֹ��늄�(d��ng)�C(j��)ֹͣ������ֹͣ��ˮ���@�ӱ���Ԍ�(sh��)�F(xi��n)��(du��)ˮ��ˮλ�Ŀ���[14]��������·�D��D4.15��ʾ��
�D4.15 늙C(j��)�����·�D
4.10 ���T(m��n)���·Watchdog���O(ji��n)�ض��r(sh��)�������g(sh��)��һ��(g��)�cCPU��(g��u)���]�ϻ�·�Ķ��r(sh��)�����ǿ��ɔ_�Ϳɿ��Դ�ʩ֮һ��
���Ɇ�Ƭ�C(j��)��(g��u)�ɵ���Ӌ(j��)��C(j��)ϵ�y(t��ng)�У����چ�Ƭ�C(j��)�Ĺ���������(hu��)�ܵ���(l��i)�����늴ň�(ch��ng)�ĸɔ_����ɳ�������w����������ѭ�h(hu��n),����������\(y��n)�б���࣬�Ɇ�Ƭ�C(j��)���Ƶ�ϵ�y(t��ng)�o(w��)���^�m(x��)��������(hu��)�������(g��)ϵ�y(t��ng)������ͣ����B(t��i)���l(f��)�������A(y��)�ϵĺ�������Գ��ڌ�(du��)��Ƭ�C(j��)�\(y��n)�Р�B(t��i)�M(j��n)�Ќ�(sh��)�r(sh��)�O(ji��n)�y(c��)�Ŀ��]����a(ch��n)����һ�N���T(m��n)���ڱO(ji��n)�y(c��)��Ƭ�C(j��)�����\(y��n)�Р�B(t��i)��оƬ���Q�����T(m��n)����
(watchdog)��
���T(m��n)���·�đ�(y��ng)�ã�ʹ��Ƭ�C(j��)�����ڟo(w��)�ˠ�B(t��i)��(sh��)�F(xi��n)�B�m(x��)�������乤��ԭ���ǣ����T(m��n)��оƬ�͆�Ƭ�C(j��)��һ��(g��)I/O���_���B��ԓI/O���_ͨ�^(gu��)������������r(sh��)�������T(m��n)�����@��(g��)���_��������ƽ(����ƽ�����@һ�����Z(y��)���Ƿ�ɢ�ط��چ�Ƭ�C(j��)���������Z(y��)�����g�ģ�һ����Ƭ�C(j��)���ڸɔ_��ɳ������w�������ijһ������M(j��n)����ѭ�h(hu��n)��B(t��i)�r(sh��)����(xi��)���T(m��n)�����_�ij���㲻�ܱ���(zh��)�У��@��(g��)�r(sh��)���T(m��n)���·�͕�(hu��)���ڵò�����Ƭ�C(j��)�́�(l��i)����̖(h��o)���������͆�Ƭ�C(j��)��(f��)λ���_���B�����_���ͳ�һ��(g��)��(f��)λ��̖(h��o)��ʹ��Ƭ�C(j��)�l(f��)����(f��)λ��������ij���惦(ch��)������ʼλ���_(k��i)ʼ��(zh��)�У��@�ӱ㌍(sh��)�F(xi��n)�ˆ�Ƭ�C(j��)���Ԅ�(d��ng)��(f��)λ��
���T(m��n)��,�ֽ� watchdog timer����һ��(g��)���r(sh��)���·��һ����һ��(g��)ݔ�룬��ι��(kicking the dog or service the dog)��һ��(g��)ݔ����MCU��RST�ˣ�MCU���������ĕr(sh��)��ÿ��һ�˕r(sh��)�gݔ��һ��(g��)��̖(h��o)��ι���ˣ��oWDT���㣬������^(gu��)Ҏ(gu��)���ĕr(sh��)�g��ι����(һ���ڳ������w�r(sh��))WDT���r(sh��)���^(gu��),�ͻؽo��һ��(g��)��(f��)λ��̖(h��o)��MC����MCU��(f��)λ����ֹMCU���C(j��)�����T(m��n)�������þ��Ƿ�ֹ����l(f��)����ѭ�h(hu��n)�������f(shu��)�������w[15]��
����ԭ������ϵ�y(t��ng)�\(y��n)���Ժ�Ҳ�͆���(d��ng)�˿��T(m��n)����Ӌ(j��)��(sh��)�������T(m��n)�����_(k��i)ʼ�Ԅ�(d��ng)Ӌ(j��)��(sh��)���������һ���ĕr(sh��)�g߀��ȥ�忴�T(m��n)������ô���T(m��n)��Ӌ(j��)��(sh��)���͕�(hu��)����Ķ������T(m��n)���Д࣬���ϵ�y(t��ng)��(f��)λ��������ʹ���п��T(m��n)����оƬ�r(sh��)Ҫע���忴�T(m��n)����
ϵ�y(t��ng)ܛ��"���T(m��n)��"���O(sh��)Ӌ(j��)˼·��
��1�����T(m��n)�����r(sh��)��T0���O(sh��)�á��ڳ�ʼ������K���O(sh��)��T0�Ĺ�����ʽ�����_(k��i)���Д��Ӌ(j��)��(sh��)���ܡ�ϵ�y(t��ng)Fosc=12 MHz��T0��16λӋ(j��)��(sh��)�������Ӌ(j��)��(sh��)ֵ��(2��16�η�)-1=65 535��T0ݔ��Ӌ(j��)��(sh��)�l���ǡ�Fosc/12��������ڞ�(65 535+1)��1=65 536(��s)��
��2��Ӌ(j��)�����س���ѭ�h(hu��n)һ�εĺĕr(sh��)�����]ϵ�y(t��ng)������ģ�K����ѭ�h(hu��n)�Δ�(sh��)����ϵ�y(t��ng)�����Ƴ�����\(y��n)�Еr(sh��)�g�s��16.6 ms��ϵ�y(t��ng)�O(sh��)�á����T(m��n)�������r(sh��)��T0���r(sh��)30 ms(T0�ij�ֵ��65536-30000=35536)�����س����ÿ��ѭ�h(hu��n)����ˢ��T0�ij�ֵ��������M(j��n)�롰��ѭ�h(hu��n)����T0�ij�ֵ��30 ms��(n��i)δ��ˢ�£��@�r(sh��)�����T(m��n)�������r(sh��)��T0���������Ո(q��ng)�Дࡣ
��3���O(sh��)Ӌ(j��)T0�������(du��)��(y��ng)���Д����(w��)�����ӳ���ֻ�һ�lָ�����T0��(du��)��(y��ng)���Д�������ַ(000BH)��(xi��)�롰�o(w��)�l���D(zhu��n)�ơ������Ӌ(j��)��C(j��)�ϻ�����(g��)����ĵ�һ�У���(du��)��Ƭ�C(j��)�����M(j��n)�г�ʼ�����@�����_�Ĉ�(zh��)�����
������r�£�CPU��Watchdog�����r(sh��)������ǰ��(du��)���L��(w��n)1�Σ����r(sh��)�������_(k��i)ʼӋ(j��)�r(sh��)��Watchdog�������ã�����l(f��)�������r(sh��)��̖(h��o)���͕�(hu��)���F(xi��n)���Ķ�����ϵ�y(t��ng)��(f��)λ�����w�Č�(sh��)�F(xi��n)�·��D4.15��ʾ��
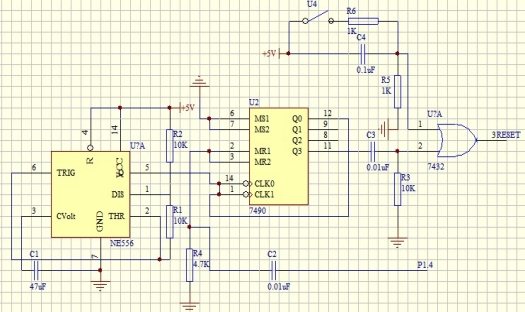 �D4.15���T(m��n)���·�·�D
�D4.15���T(m��n)���·�·�D���·����Ҫ������ʹ�Ă�����ݔ�����ƽ�܉�(w��n)����ݔ���Ƭ�C(j��)�У���Ҫ�����O�ܵăɘO�Ŵ�(w��n)���·�M�ɣ��乤���^(gu��)����ˮλ̽�y(c��)��������̽�y(c��)�������̖(h��o)�ͽoR12,���������Ǹ��ƽ�tR11��Q5��D3��Q4��(d��o)ͨ�ѵ���1.4V�ĵ��ƽ��(w��n)�����ͽo��Ƭ�C(j��)������ǵ��ƽ�ͽoR12�tR11��Q5��D3��Q4�����܌�(d��o)ͨ����R13��(d��o)ͨ���Ѹ���1.4V�ĸ��ƽ��(w��n)�����ͽo��Ƭ�C(j��)[16]����(w��n)���·���O(sh��)Ӌ(j��)���D4.16��ʾ��
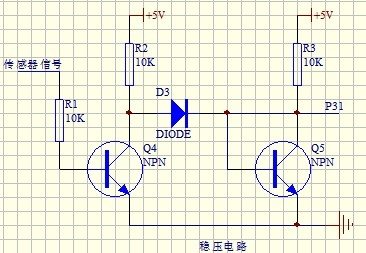 �D4.16 ��(w��n)���·
�D4.16 ��(w��n)���·��(d��ng)ˮλ����90�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)׃�����l(f��)����̖(h��o)��LG�]�ϣ�ϵ�y(t��ng)ˮλ�߈�(b��o)����D6����
��(d��ng)ˮλ����75�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)׃�����l(f��)����̖(h��o)��LD�]�ϣ�ϵ�y(t��ng)ˮλ�͈�(b��o)����D7����
��(d��ng)ˮλ����50�_(k��i)�ȵĕr(sh��)���ɂ�������(j��ng)׃�����l(f��)����̖(h��o)��LDD�]�ϣ�ϵ�y(t��ng)ˮλ�͵͈�(b��o)����D8��[17]��
��(b��o)���·��D4.17��ʾ��
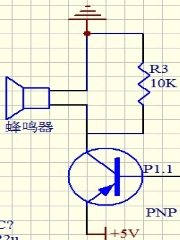
 �D4.17 ��(b��o)���·�D
�D4.17 ��(b��o)���·�D
5 ܛ���O(sh��)Ӌ(j��)
5.1 �����O(sh��)Ӌ(j��)���̈D
�D5.1 �����O(sh��)Ӌ(j��)��D
5.2 �����O(sh��)Ӌ(j��)
5.2.1 �I�P(p��n)���������I�P(p��n)���õ���4*4�ĽY(ji��)��(g��u)����˿�ʹ�õ��I��16��(g��)������(j��)��Ҫ�քe���x���I��0-9̖(h��o)�锵(sh��)���I��10-15̖(h��o)�քe�Ǵ_���I�����I����λ�I����/�p�I��ȡ���I�͏�(f��)λ�I���������£�
KEY: MOV P2��#07H ���÷��D(zhu��n)�����I
KEY1: MOV B,A �����I���£����I�a
MOV A,P2
MOV DPTR,# T ABLE
ANL A,# 07H
MOV R3,# 0FFH �������a��Ԫ��ʼ��
MOV B,A
KEY2��INC R3
MOV P2��# 0F8H
MOV A,R3
MOV A,P2
MOV C A,@DPTR
ANL A,#0F8H
CJNE A,KEY3 �����I�a�������a
ORL A,B
MOV A,R3 �����ҵ��I�a�������a
CJNE A,# 0FFH,KEY 1
RET
RET ���o(w��)�I����
KEY3: CJNE A,# 0FFH,KEY2 ���Д��Ƿ����
RET ���Ѳ��꣬�I�aδ�ҵ����ԟo(w��)���I̎��
TABLE:DB 0F6H,0EEH,0DEH,0BEH,7EH �����I�����a��
5.2.2 A/D�D(zhu��n)�Q�ӳ���A/D�D(zhu��n)�Q�ӳ������£�
ADCC:PUSH ACC ��ģ��(sh��)�D(zhu��n)�Q����
PUSH B
MOV DPTR,# 0BFFFH
MOVX A,@DPTR ���xģ��(sh��)�D(zhu��n)�Qֵ
MOV B,# 0AH ��ʮ��/ʮ�M(j��n)���D(zhu��n)�Q
DIV AB
MOV DSP1��B
MOV B,# 0AH
DIV AB
MOV DSP2��B
MOV DSP3��A
POP B
POP ACC
SETB EA
RETI
5.2.3 ��ʼ������ ORL P2��#0FH ����ʼ��
SETB P1.7 ���P(gu��n)�]ˮ��
SETB P1.2 ���P(gu��n)�]��(b��o)����
ANL P1��#03H ����z��ˮλ��B(t��i)����(zh��n)��
MOV A,P1 ���xP1��
JNB ACC.0��LOOP1 ����(d��ng)P1.0=0�t�D(zhu��n)
JB ACC.1��LOOP2 ����(d��ng)1.1=1�t�D(zhu��n)
5.2.4 �\(y��n)�Р�B(t��i)�µij���1. 늙C(j��)���\(y��n)�D(zhu��n)����(b��o)������푣���ˮ�M��LED��
SETB P1.7 ��ʹP1.7=1��ֹͣ늙C(j��)����
SETB P1.2 ���P(gu��n)�]��(b��o)����
CLR P2.3 ����ˮ�M��LED��
2. �m�Р�B(t��i)�µij���
늙C(j��)�\(y��n)�D(zhu��n)����(b��o)������푣���Ƿˮ��LED��
SETB P1.2 ���P(gu��n)�]��(b��o)����
CLR P2.2 �����m��LED��
3. Ƿˮ��B(t��i)�µij���
늙C(j��)�\(y��n)�D(zhu��n)����(b��o)������푣���Ƿˮ��LED��
CLR P1.7 ��ʹP1.7=0������(d��ng)늙C(j��)����
SETB P1.2 ���P(gu��n)�]��(b��o)����
CLR P2.1 ��Ƿˮ��LED����
4. ���Ϡ�B(t��i)�µij���
늙C(j��)���\(y��n)�D(zhu��n)����(b��o)�����3S���P(gu��n)�]����Ƿˮ���͡����ϡ�LEDһֱ��
SETB P1.7 ��ʹP1.7=1��ֹͣ늙C(j��)����
CLR P1.2 ����(b��o)�����
CLR P2.1 ����Ƿˮ��LED��
CLR P2.0 �������ϡ�LED��
ACALL DELAY ���{(di��o)��3S�ӕr(sh��)�ӳ���
SETB P1.2 ���P(gu��n)�]��(b��o)����
LOOP4��AJMP LOOP4 �����F(xi��n)���Ϻ�����M(j��n)��ȴ���B(t��i)
�Y(ji��) Փ
��ϵ�y(t��ng)�ͽ�B��һ�N�Ԇ�Ƭ�C(j��)����Č�(du��)ˮ��ˮλ�M(j��n)�п��Ƶķ������֞�Ӳ����ܛ���ɂ�(g��)���֣�Ӳ�����ֽ�B��ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)�Ĺ��ܣ��Լ�Ҫ��(sh��)�F(xi��n)�@Щ���������Ӳ���O(sh��)�䣬��ͨ�^(gu��)��N�����ı��^�õ���ѵķ�����������(j��)Ӳ���O(sh��)��Ĺ��ܾ���(xi��)������������ͨ�^(gu��)��������(y��ng)�đ�(y��ng)��ܛ���͵��Ԍ�(sh��)�F(xi��n)�ˡ�
ܛ����Ӳ���O(sh��)Ӌ(j��)���ֵijɹ��c��ֱ��Ӱ��@ϵ�y(t��ng)���ܵă�(y��u)�ӡ���ʼ����Ҫ������Д��΄�(w��)������ϵ�y(t��ng)���_(k��i)ʼ���ܙz�y(c��)��̖(h��o)�������̖(h��o)�](m��i)��Խ�^(gu��)�O(sh��)���Ľ��ޣ���ôϵ�y(t��ng)��(hu��)�^�m(x��)����z�y(c��)�������̖(h��o)Խ�^(gu��)���O(sh��)���Ľ��ޣ�ϵ�y(t��ng)�͕�(hu��)��ͣ��(d��ng)ǰ�Ĺ������M(j��n)�뵽�Д�̎���������Д�̎���^(gu��)���У����Д��Ƿ���ˮλ̎�ژO�͠�B(t��i)�����Єt��(b��o)�����](m��i)�Єt�^�m(x��)�z�y(c��)ˮλ�Ƿ���������ߵ������ޣ������ˮλ��̖(h��o)ݔ����ˮλ��̖(h��o)ݔ�룬ϵ�y(t��ng)�t�M(j��n)���{(di��o)��(ji��)���Д�غ��^�m(x��)���z�y(c��)���@��������Д����ĘO����̖(h��o)�Д࣬Ȼ���D(zhu��n)������(y��ng)��̎������
�Æ�Ƭ�C(j��)�M(j��n)�п��ƣ��܉�ֱ�^�ķ���(y��ng)ˮλ���\(y��n)�Р�B(t��i)����ˮ��Ă�������̖(h��o)ͨ�^(gu��)�x���@ʾ����������̖(h��o)��ݔ�룬ʹ��ˮλ���ڿ��ƣ�������r(ji��)�ͣ����������{(di��o)ԇ�����Æ�Ƭ�C(j��)��ˮλ����ϵ�y(t��ng)���\(y��n)�з�(w��n)��������Ч�����@���ƣ�ͬ�r(sh��)�������˿���ϵ�y(t��ng)�Ŀ��ɔ_���������C��ˮλ���\(y��n)��(d��ng)�\(y��n)�С�ˮ���������������ˆ�Ƭ�C(j��)�����c(di��n)��ܛ���S�o(h��)��(ji��n)�η��㣬�������õđ�(y��ng)��ǰ������˿����A(y��)Ҋ(ji��n)����Ӌ(j��)��C(j��)����ˮλϵ�y(t��ng)�Ƿdz���Ҫ�ġ�
�ܕr(sh��)�g�ͽ�(j��ng)�(y��n)���ƣ���ϵ�y(t��ng)�в��������M(j��n)�ĵط���
��1�����ڕr(sh��)�g�ͽ�(j��ng)�(y��n)���ޣ�����ֻ�ܮ�(hu��)��Ӳ���D��ԭ��D�ͳ������̈D�����](m��i)�Ю�(hu��)��ģ�M�D��
��2�� PROTELܛ��֮ǰ���](m��i)�ЌW(xu��)�^(gu��)������ʹ������(l��i)��(hu��)���^���衣
�� �x��W(xu��)�������I(y��)������@����ČW(xu��)��(x��)�����ɵøп��f(w��n)�֣�ͨ�^(gu��)��������ČW(xu��)��(x��)�����I(y��)Փ���������ɡ����^��������ȡ�õ�ÿһ�ݳɿ�(j��)�����x���_(k��i)����?ch��)���ͬ�W(xu��)�����ώ��Ď����c�Ą�(l��)���ڴ˱��_(d��)��������x�⡣���B(t��i)�Ⱥ̈́�(chu��ng)���ԵĿ��з�ʽʹ������˜\���ڴˣ�֔(j��n)��?q��)�����ʾ�����ĵĸ��x�ͳ�ߵľ��⡣
���1ϵ�y(t��ng)ԭ����D1
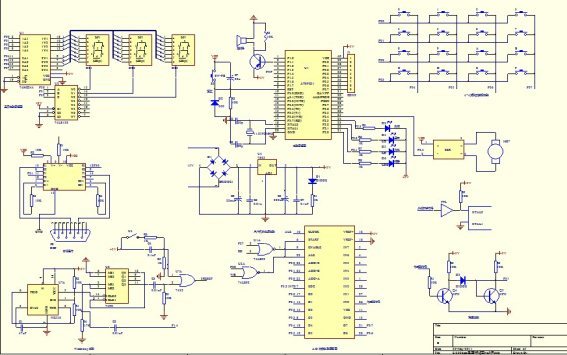 �D1 ϵ�y(t��ng)ԭ��D
�D1 ϵ�y(t��ng)ԭ��D
���2
�������O(sh��)Ӌ(j��)��
- 1. ��ʼ������
- ORL P2��#0FH ����ʼ��
- SETB P1.7 ���P(gu��n)�]ˮ��
- SETB P1.2 ���P(gu��n)�]��(b��o)����
- ANL P1��#03H ����z��ˮλ��B(t��i)����(zh��n)��
- MOV A,P1 ���xP1��
- JNB ACC.0��LOOP1 ����(d��ng)P1.0=0�t�D(zhu��n)
- JB ACC.1��LOOP2 ����(d��ng)1.1=1�t�D(zhu��n)
- 2. �I�P(p��n)�·
- KEY: MOV P2��#07H ���÷��D(zhu��n)�����I
- KEY1: MOV B,A �����I���£����I�a
- MOV A,P2
- MOV DPTR,# T ABLE
- ANL A,# 07H
- MOV R3,# 0FFH �������a��Ԫ��ʼ��
- MOV B,A
- KEY2��INC R3
- MOV P2��# 0F8H
- MOV A,R3
- MOV A,P2
- MOV C A,@DPTR
- ANL A,#0F8H
- CJNE A,KEY3 �����I�a�������a
- ORL A,B
- MOV A,R3 �����ҵ��I�a�������a
- CJNE A,# 0FFH,KEY 1
- RET
- RET ���o(w��)�I����
- KEY3: CJNE A,# 0FFH,KEY2 ���Д��Ƿ����
- RET ���Ѳ��꣬�I�aδ�ҵ����ԟo(w��)���I̎��
- TABLE:DB 0F6H,0EEH,0DEH,0BEH,7EH �����I�����a��
- 3. A/D�D(zhu��n)�Q�ӳ���
- ADCC:PUSH ACC ��ģ��(sh��)�D(zhu��n)�Q����
- PUSH B
- MOV DPTR,# 0BFFFH
- MOVX A,@DPTR ���xģ��(sh��)�D(zhu��n)�Qֵ
- MOV B,# 0AH ��ʮ��/ʮ�M(j��n)���D(zhu��n)�Q
- DIV AB
- MOV DSP1��B
- MOV B,# 0AH
- DIV AB
- MOV DSP2��B
- MOV DSP3��A
- POP B
- POP ACC
- SETB EA
- RETI
- 4. ˮ�M��B(t��i)�µij���
- 늙C(j��)���\(y��n)�D(zhu��n)����(b��o)������푣���ˮ�M��LED��
- SETB P1.7 ��ʹP1.7=1��ֹͣ늙C(j��)����
- SETB P1.2 ���P(gu��n)�]��(b��o)����
- CLR P2.3 ����ˮ�M��LED��
- 5. �m�Р�B(t��i)�µij���
- 늙C(j��)�\(y��n)�D(zhu��n)����(b��o)������푣���Ƿˮ��LED��
- SETB P1.2 ���P(gu��n)�]��(b��o)����
- CLR P2.2 �����m��LED��
- 6. Ƿˮ��B(t��i)�µij���
- 늙C(j��)�\(y��n)�D(zhu��n)����(b��o)������푣���Ƿˮ��LED��
- CLR P1.7 ��ʹP1.7=0������(d��ng)늙C(j��)����
- SETB P1.2 ���P(gu��n)�]��(b��o)����
- CLR P2.1 ��Ƿˮ��LED����
- 7. ���Ϡ�B(t��i)�µij���
- 늙C(j��)���\(y��n)�D(zhu��n)����(b��o)�����3S���P(gu��n)�]����Ƿˮ���͡����ϡ�LEDһֱ��
- SETB P1.7 ��ʹP1.7=1��ֹͣ늙C(j��)����
- CLR P1.2 ����(b��o)�����
- CLR P2.1 ����Ƿˮ��LED��
- CLR P2.0 �������ϡ�LED��
- ACALL DELAY ���{(di��o)��3S�ӕr(sh��)�ӳ���
- SETB P1.2 ���P(gu��n)�]��(b��o)����
- LOOP4��AJMP LOOP4 �����F(xi��n)���Ϻ�����M(j��n)��ȴ���B(t��i)
 ���چ�Ƭ�C(j��)��ˮλ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)���I(y��)Փ��.doc
(1.02 MB, ���d��(sh��): 128)
���چ�Ƭ�C(j��)��ˮλ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)���I(y��)Փ��.doc
(1.02 MB, ���d��(sh��): 128)